LM优化算法的IMU阵列在线校准
来源:新东方在线 发布时间:2023-04-15 点击:
刘国念 江金光 吴家骥 龚一民 杜 莹
1 武汉大学卫星导航定位技术研究中心,武汉市珞喻路129号,430079 2 武汉梦芯科技有限公司,武汉市高新大道980号,430079
低成本的MEMS IMU由于随机误差较大,应用于惯性导航系统时误差增长较快。利用多个传感器构建IMU阵列,通过不同的融合方式融合冗余的观测数据能有效降低随机误差[1]。但由于集成电路制造工艺的缺陷,每个IMU的输出都会存在因零偏、比例因子和非正交[2]偏离理想值引起的差异。此外,多个传感器放置在一起时,安装误差也会导致IMU的输出存在差异。因此,为了更好地运用IMU,在使用前需要对传感器进行校准。
传统的IMU阵列的校准需要通过昂贵的精密转台提供所需的已知激励[3-5]。但转台的使用增加了IMU阵列的使用成本,因此,不使用转台的IMU阵列在线校准方法成为研究热点。在静态条件下,可利用地球重力加速度作为激励校准加速度计[6]误差参数,但由于地球自转角速度数值较小,无法从MEMS IMU的噪声中分离,缺少参考激励使得陀螺仪误差校准方法较少使用。Rohac等[7]使用激光陀螺获得参考激励的精确数值,但增加了额外成本。Carlsson等[8]提出一种块坐标下降法(block coordinate descent, BCD)联合估计误差参数(包含IMU之间的距离)和载体的运动参数,但该方法需要提供较大激励,难以控制输入。
本文提出一种IMU阵列在线校准方法,通过对IMU阵列的误差参数构建相应的损失函数,利用LM优化算法估计加速度计和陀螺仪的误差参数。该方法无需任何外部参考设备,只需在手机支架上获得一系列静置和运动数据。
1.1 IMU误差建模

(1)
(2)


(3)
1.2 损失函数
1.2.1 加速度计损失函数
将第k个加速度计需要校准的参数定义为:
(4)
静止状态下,加速度计的比力输出只与当地重力加速度有关,则加速度计输出估计函数为:
(5)
将导航坐标系定义为北东地,载体坐标系定义为前右下,此时:
(6)
式中,φ、γ分别为横滚角、俯仰角,g为当地的重力加速度。
由式(6)可以看出,每个静态位置存在横滚角和俯仰角2个未知数,因此加速度计在每个位置多输出了1个冗余量。若要校准加速度计的所有参数,至少需要放置12个或者9个非共面的位置。本文采用一种多个位置的静态校准方式校准加速度计,将加速度计校准参数的损失函数建模为:
(7)

1.2.2 陀螺仪损失函数
式中,tc为冷水平均温度,℃;
t2′为冷水进口温度,℃;
t2″为冷水出口温度,℃;
Rec为冷水侧雷诺数;
V2为冷水流速,m/s;
vc为冷水运动粘度,m/s;
λc为冷水侧导热系数,W/m·K;
Prc为冷水侧普朗特数;
Nu2为冷水侧努塞尔系数;
h2为冷水侧换热系数,W/m2·K.
将第k个陀螺仪需要校准的参数定义为:
(8)
由于MEMS工艺制造的IMU噪声太大,地球自转角速度无法分离而不能成为参考源。静置的加速度输出通过校准后具有很好的稳定性,且能得到各个静态位置重力的投影值,本文将其作为陀螺仪校准的参考值。在假定陀螺仪是无偏的前提下,即陀螺仪的数据通过一定时间内的平均可以得到零偏,利用2个静态位置之间转动过程中陀螺仪的数据,通过数值积分方法得到2个静态位置之间的旋转矩阵。利用静态位置和旋转矩阵估计下一个静态位置的重力投影估计值(式(9)),进而构建陀螺仪损失函数(式(10)):
(9)
(10)

1.3 算法设计
式(7)和式(10)是非线性函数,本文利用LM优化算法迭代求解出待定误差参数最优解。LM优化算法对于初值的设定比较严格,初值误差较大会使迭代进入局部最优。因此,除了陀螺仪的零偏,将加速度计和陀螺仪的确定性误差初值都设定为理想值,N个静态位置的横滚角和俯仰角的初值使用加速度计的原始输出计算:
(11)
(12)
其中,[p]i为向量p中的第i维数值。
数值积分使用经典的4阶Runge-Kutta积分,通过对2个历元之间的角速度积分得到当前历元的姿态四元素,并通过递推得到2个静态位置之间的旋转矩阵[9]。
图1为在线校准算法流程,首先利用加速度计的方差构建一个静态检测器,将静态和动态数据分离;
然后使用LM算法和静态数据对式(7)进行迭代求解,当整体误差和小于阈值时,加速度计校准完成;
最后利用加速度计校准后的静态数据和动态数据对式(10)进行迭代求解,得到陀螺仪的误差参数。

图1 在线校准算法流程Fig.1 Flow chart of online calibration algorithm
为验证本文算法的有效性,分别进行仿真实验、实测校准实验和车载导航实验。
2.1 仿真实验

表1 ICM42688P误差标称参数Tab.1 Error nominal parameters of ICM42688P
利用文献[10]的开源MATLAB惯导工具箱中的轨迹生成器进行如式(13)和(14)的拓展,得到IMU阵列的仿真数据,其频率为100 Hz:
(13)
(14)



图2 IMU阵列分布Fig.2 Distribution of IMU array
将校准结果与设定的误差参数作差得到参数的残差值,结果如图3所示。从图3(a)看出,加速度计和陀螺仪的零偏精度分别达到1.3×10-4m/s2和1.3×10-3dps;
从图3(b)看出,加速度计和陀螺仪的尺度变换矩阵精度分别达到3.3×10-5和7.9×10-5,校准结果与设定的误差参数值一致性较好。
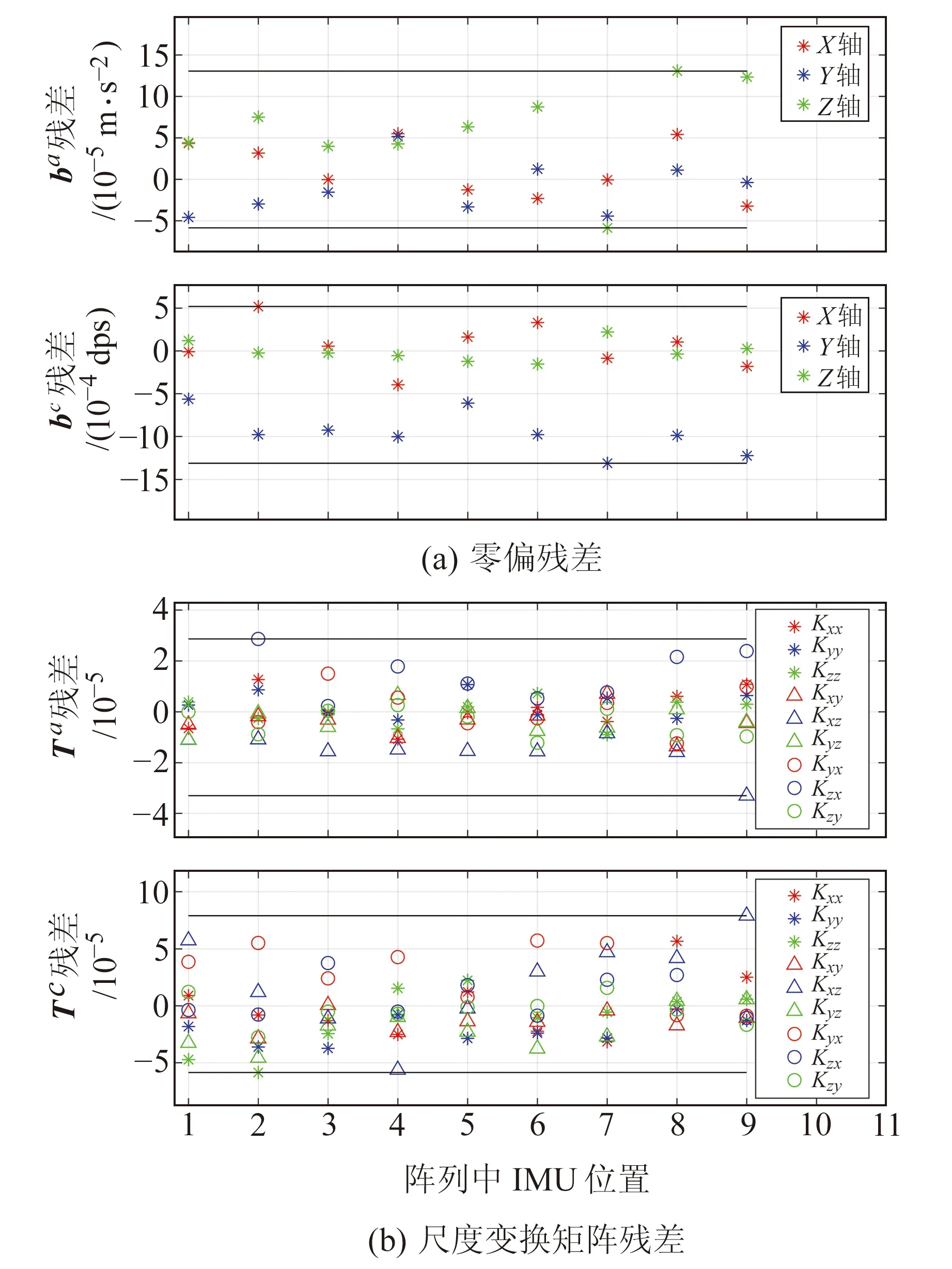
图3 残差统计Fig.3 Residuals statistics
2.2 实测校准实验
实测校准实验使用实验室内部设计的一款IMU阵列,其中IMU使用InvenSense公司的ICM系列产品。为兼顾IMU阵列的性能和MCU管脚的使用情况,所设计的阵列由9个IMU构成3×3的矩阵,如图4(a)所示。在IMU阵列的驱动设计过程中,使用串行外设接口(serial peripheral interface, SPI)通信协议,并利用ICM42688P内部的FIFO获取原始数据,减少SPI片选信号的开关次数,提高系统的时间同步可靠性。加速度计量程设置为±2g,陀螺仪量程设置为±250 dps,量程范围与常用的车载量程设置相同,便于将校准参数应用于车载导航解算中。
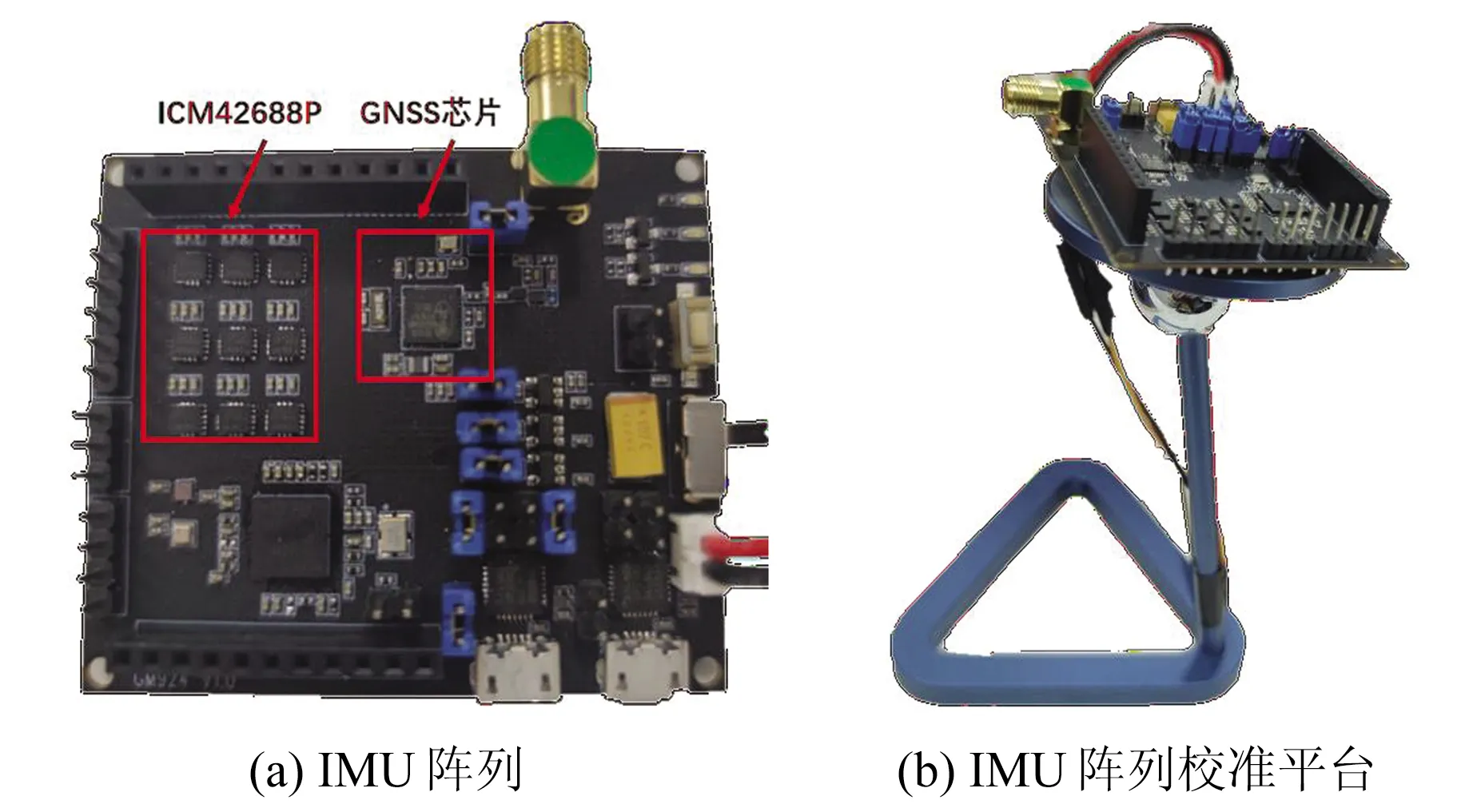
图4 IMU阵列及校准平台Fig.4 IMU array and calibration platform
阵列校准平台如图4(b),该校准平台上是一个手机支架,可以进行360°手动旋转,并且在数据采集过程中,能使阵列数据在运动后短时间内稳定为静态数据,同时保证转动角速度控制在量程范围内。为降低加速度的噪声以及减少Runge-Kutta积分过程造成的误差,将IMU阵列在校准平台上的静置时间设定为8~10 s,动态间隔时间设定为1~4 s,每组校准实验采集35~50个静态和动态数据。表2、3分别是8组校准实验的均值和误差参数范围统计。可以看出,加速度计零偏及尺度变换波动范围分别为-83~59 mg和-0.005~0.008,陀螺仪零偏及尺度变换波动范围分别为-1.1~0.54dps和0.013~0.016。ICM42688P的各项误差数值都偏小,因此对传感器补偿后性能提升有限制。
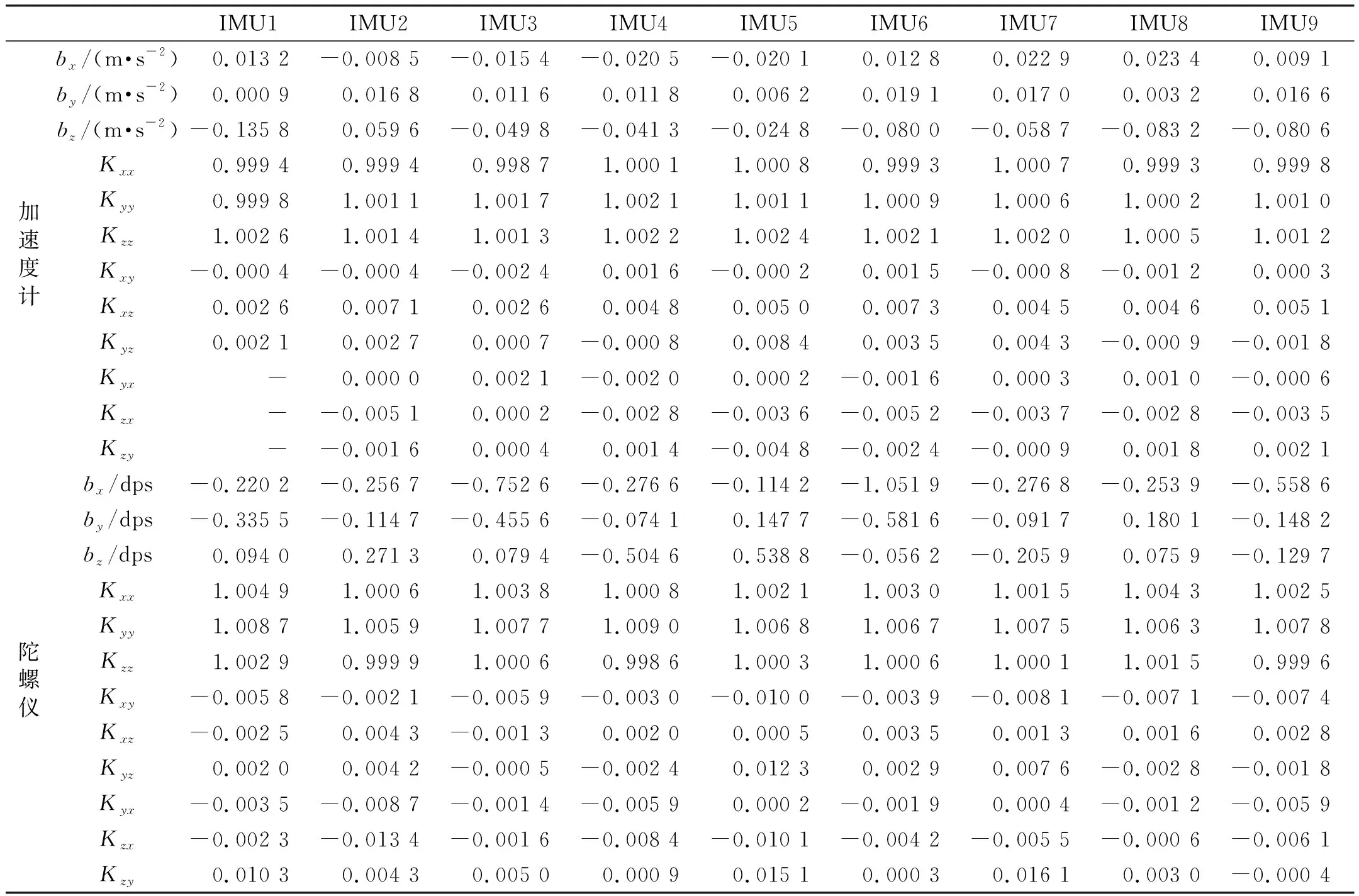
表2 校准实验均值统计Tab.2 Statistics of mean value of calibration experiments

表3 IMU阵列误差参数范围统计Tab.3 Error parameter range statistics of IMU array
2.3 车载导航实验
使用图4(a)中的IMU阵列进行车载动态组合导航实验。将IMU阵列数据通过直接平均的方式拟合成一个虚拟IMU,并利用虚拟IMU与GNSS进行松组合导航;
通过后处理设置GNSS中断,中断时间为20 s,中断间隔为60 s,比较GNSS中断后校准前后的导航误差。参考设备为高精度、具有双频RTK的NovAtel CPT6,定位精度可达cm级。由于ICM42688P的加速度计高程方向存在低频噪声、误差较大,因此本文只评价导航结果的平面误差。
图5展示了一组GNSS中断后动态导航的平面、北向和东向误差。可以看出,校准后的导航误差精度整体有所提升,尤其是误差较大的路段。GNSS中断后的不同时间段误差发散程度不一致是由IMU的随机误差引起的,随机误差越大,误差发散越快。校准后,能补偿IMU阵列的确定性误差,进行数据融合时能有效降低随机误差,在随机误差较大的路段,校准后的IMU阵列能大幅度降低随机误差,改善效果较为明显。
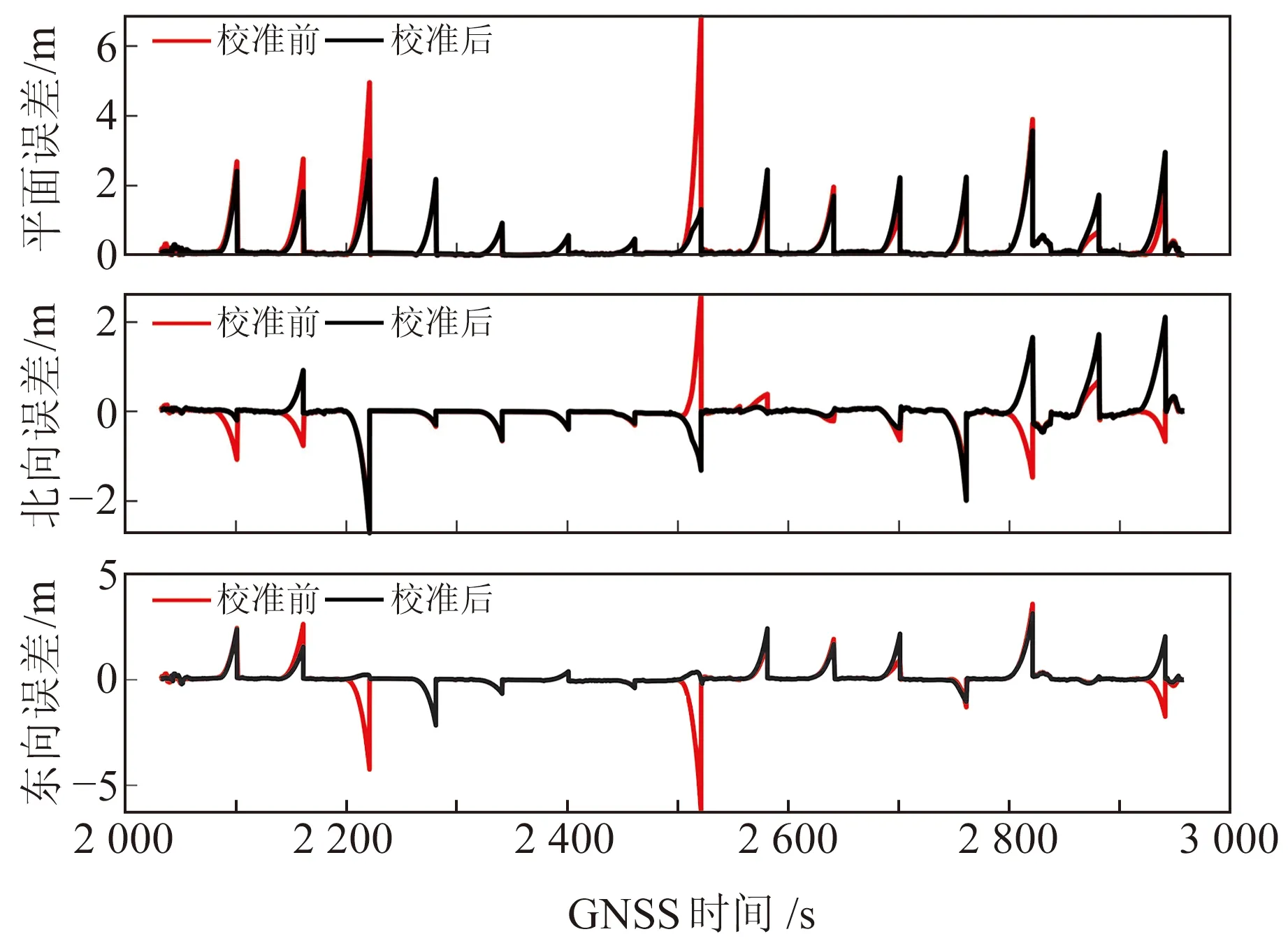
图5 动态导航误差Fig.5 Dynamic navigation errors
3组不同GNSS中断实验的平面误差RMS统计结果如表4所示(t_sta为起始导航时刻,t_sta+50 s为起始中断时刻)。可以看出,IMU阵列校准后,3组中断实验精度均有提升,平均提升19.1%。精度提升数值较小可能是因为所使用的IMU阵列的误差数值较小,同时直接平均的数据融合方式对随机误差的降低有限;
另外,大量的数值积分会存在计算误差,使得校准的数值精度下降,进而影响动态导航的精度。
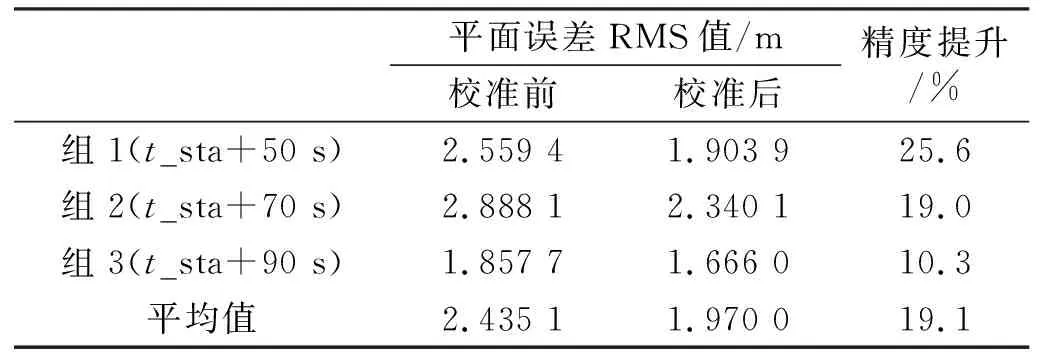
表4 动态导航平面RMS值Tab.4 Plane RMS of dynamic navigation
本文提出一种在线IMU阵列校准方式,分别对加速度计和陀螺仪构建损失函数,利用求解非线性函数的LM优化算法,迭代得出IMU阵列的各个误差项。仿真实验结果显示,加速度计校准的零偏和尺度变换误差残差精度达到1.3×10-4m/s2和3.3×10-5,陀螺仪校准的零偏和尺度变换误差残差精度达到1.3×10-3dps和7.9×10-5,误差参数设定值与校准值一致性较好。3组实物测试结果显示,校准后IMU阵列的动态导航精度平均提升19.1%,表明该方法能有效校准IMU阵列的误差参数,提高动态导航性能。
猜你喜欢陀螺仪加速度计冷水基于加速度计的起重机制动下滑量测量中国特种设备安全(2021年5期)2021-11-06基于EMD的MEMS陀螺仪随机漂移分析方法北京航空航天大学学报(2021年9期)2021-11-02冷水泡面小天使·五年级语数英综合(2021年10期)2021-10-19我国著名陀螺仪专家——林士谔百科探秘·航空航天(2017年9期)2017-12-31绿豆汤冲鸡蛋治嘴角糜烂特别健康·上半月(2017年10期)2017-09-22基于遗传算法的加速度计免转台标定方法中国惯性技术学报(2017年1期)2017-06-09绿豆汤冲鸡蛋治嘴角糜烂特别健康(2017年10期)2017-03-07孙红雷:请把冷水换成温水中学生(2016年13期)2016-12-01微机械陀螺仪概述和发展山东工业技术(2016年15期)2016-12-01常温下硅微谐振加速度计零偏稳定性的提高光学精密工程(2016年5期)2016-11-07推荐访问:在线 校准 阵列