一种新的船载激光测距仪动态精度检测方法
来源:优秀文章 发布时间:2023-02-02 点击:
田英国, 张 辉, 顾新锋, 许国伟
(1.中国卫星海上测控部,江苏 江阴 214431;
2.国防大学联合作战学院,河北 石家庄 050001)
激光测距仪因具有指向性好、测量距离远、精度高、对光源相干性要求较低、可实时测量观测者相对于目标的距离等优点,在测量船实际应用中发挥了重要作用。
目前,船载激光测距仪通常为脉冲式激光测距仪,影响脉冲式激光测距仪精度的因素主要有脉冲激光的时间宽度、光波传播速度的测量精度、大气折射率、时钟频率的误差、计时误差、仪器测量误差等[1-2]。特别是船载激光测距仪长期处于动态或震动的特殊环境下,激光发射光轴和接收光轴平行度、电子线路漂移、振荡频率和频率稳定性等容易受到影响,进而影响其测量精度。根据我国的JJF 1324—2011《脉冲激光测距仪校准规范》,激光测距仪的检定周期一般不超过1年[3]。
近年来,许多研究机构根据不同激光测距仪的使用和精度需求,提出了许多不同的检定方法。史洁琴等[4]对光纤基线标定激光测距仪方法进行了研究,建立了激光器与光纤耦合模型,并实现了200 m以内的激光测距仪标定。蔡青梅等[5]通过光路折叠方法实现了2倍光程倍增,建立100 m室内基线场,有效解决了室内基线检测效率低、可重复性差等技术问题。刘红光等[6]在50 m高精度导轨上利用3个平面反射镜进行光路折叠,实现了4倍光程倍增,搭建了室内200 m基线,并对Leica DISTOTMD510型手持式激光测距仪开展了50~200 m测段的检定实验,检测精度可达毫米量级。董洪舟等[7]采用光电延时法设计的距离模拟器实现了50 m~990 km的大量程距离模拟,经测试全量程内距离模拟误差小于1 m。
上述方法均属于室内检测方法,检测船载激光测距仪精度需要建立激光测距专用标定环境或者拆装后到指定机构进行激光测距仪精度检测,且室内检测方法检测距离范围有限。为此,钟德安[8]采用校飞方法检测船载激光测距仪精度,即用载有激光合作目标的飞机,按规划航行路线飞行,被检测的激光测距仪和作为比较标准的设备同时跟踪飞机,通过飞行试验评估激光测距系统的精度。但在实际使用过程中,该方法采用全球卫星导航系统(Global Navigation Satellite System,GNSS)相对定位的方式,需要给予特殊的海域、空域和气象保障,且飞机改装要求高,组织实施难度大,不能经常实施[9]。
针对以上激光测距仪精度检测方法存在的不足,提出一种新的激光测距仪检测方法。该方法主要利用码头已知位置的激光合作目标和船载高精度GNSS接收机,通过事后精密单点定位处理获得测量船至激光合作目标的距离,进而检测激光测距仪测距精度。该方法无须拆装激光测距仪,无须建设专用的激光测距检测设备,不涉及设备改装等就可实现激光测距仪精度检测,并可随时开展激光测距仪精度检测,可大幅提高激光测距仪精度检测的效率和检测频度。
新的激光测距仪精度检测方法主要借鉴室外实测基线比较法,但在具体实现过程中综合考虑了船舶运动等特点。该方法的基本原理是在码头附近标校塔上安装激光合作目标(已知高精度坐标值),借助船舶出航时机,利用激光测距仪实时跟踪激光合作目标,实时测量两者之间的距离,同时测量船上的高精度GNSS接收机实时记录原始观测数据,通过事后精密单点定位处理获得测量船至激光合作目标的距离,将该距离值作为比对标准进行激光测距仪的精度检测。
该方法的事后精密处理技术主要采用精密单点定位方法,精密单点定位是利用高精度的GNSS卫星星历、卫星钟差和双频载波相位观测值进行高精度定位的方法。该技术无须用户自己架设地面GNSS基准站,不受作业距离的限制,机动灵活,单机作业,为开展长距离高精度的事后甚至实时动态定位提供了新的解决方案[10]。
为了合理可靠地对激光测距仪测距精度进行检测,构建了图1所示的新的激光测距仪精度检测系统。该系统主要由3个部分组成:船载动态检测数据采集子系统、地面激光合作目标和数据处理与精度检测子系统。其中,船载动态检测数据采集子系统主要由船载激光测距仪、姿态测量设备和GNSS动态定位设备组成,主要完成激光测距仪动态跟踪地面激光合作目标,记录激光测距仪距离测量数据、GNSS原始观测数据、姿态测量数据以及对激光测距数据进行GNSS时间同步;
地面激光合作目标具有360°全向激光反射功能,且激光合作目标点具有高精度的位置信息,供数据处理系统计算测量船至激光合作目标之间的高精度距离;
数据处理与精度检测子系统主要负责对采集到的数据进行综合处理,并对激光测距仪的测量精度做出合理评估。
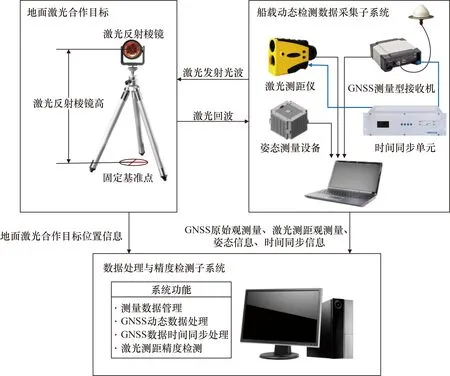
图1 新的激光测距仪精度检测系统
由于激光测距仪中心点与船载GNSS天线相位中心点存在空间距离,因此需进行位置偏差修正。位置偏差改正的关系式可表示为
(1)

式中:ψ为偏航角;θ为俯仰角;φ为横滚角。
在实际精度检测过程中,激光测距受到大气折射等的影响,采用参考文献[11]中的大气修正方法对激光测距值进行修正。根据参考文献[11]的修正方法和实验结果可知,在仰角为10°时,距离修正计算误差小于3 cm。
2.1 GNSS动态精密单点定位性能分析
为验证GNSS动态精密单点定位性能,于2020年10月开展了船载动态精密定位实验。测试船搭载了GNSS接收机,实验总时长约150 min,GNSS数据采样间隔为1 s,基准站采用了Trimble Net R9接收机,架设在固定基准点。根据文献[12]数据分析结果,Trimble公司新一代数据后处理软件Trimble Business Center(TBC)动态基线解算精度可达厘米量级。使用TBC软件以相对定位模式解算得到船载载流动站的运动轨迹,并以此结果作为参考真值,评估船载GNSS动态精密单点定位的性能,动态定位方法采用参考文献[13]的数据处理方法。图2给出了船载GNSS动态精密单点定位的位置误差,表1给出了船载GNSS动态精密单点定位位置误差统计情况。
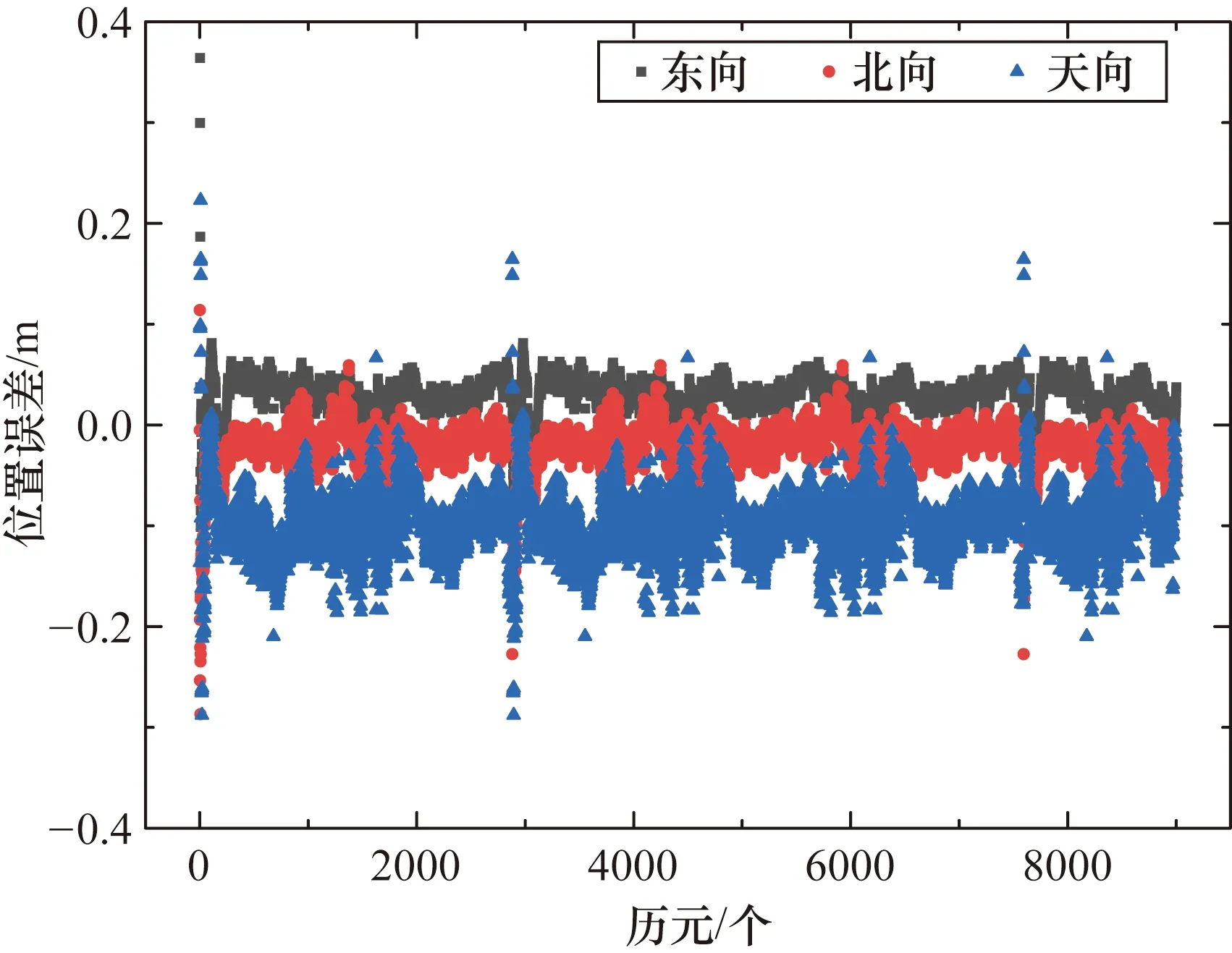
图2 船载GNSS事后动态精密单点定位位置误差
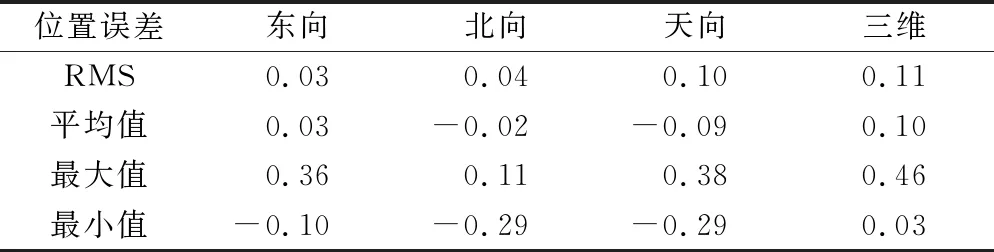
表1 船载GNSS事后动态精密单点定位位置误差统计 单位:m
从图2可知,GNSS动态精密单点定位与相对定位解相比,在东向、北向和天向都存在差异,尤其是在天向方向的差异较大。这种差异可能主要来自于精密单点定位模型同双差模型间的差异,双差模型中卫星轨道误差、卫星钟差、对流层延迟等误差可通过双差消除,而精密单点定位误差无法组差消除上述误差,因此动态精密单点定位的部分模型需进一步优化。从表1的统计结果可知,GNSS动态精密单点定位精度为11 cm,能够满足船载米级精度的激光测距仪精度检测。
为了比对分析方法的有效性,对2020年5月份船载激光测距仪历史校飞数据进行处理分析。此次校飞中,测试船和校飞飞机均搭载了高精度GNSS接收机,实验总时长约20 min,GNSS数据采样频率为5 Hz。因无更高精度位置数据作为动态参考基准,使用两种高精度GNSS数据处理软件比对的方式,给出校飞方法检测激光测距仪检测参考精度。使用GNSS数据后处理软件GrafNav进行动对动基线解算,并与Gamit Track软件处理结果[14]进行对比,结果如图3所示,位置误差统计情况如表2所示。

表2 船载GNSS与机载GNSS事后动对动相对定位位置误差统计(传统校飞方法) 单位:m

图3 船载GNSS与机载GNSS事后动对动相对定位位置误差(传统校飞方法)
对比表1和表2数据处理结果发现,采用本文提出的方法也可获得与传统校飞方法相当的效果,且不需要特殊的海域、空域和气象保障,无须改装飞机。
2.2 新激光测距仪检测方法有效性检验
采用平均偏差(Bias)和均方根误差(RMS)作为激光测距仪测距精度的检测标准。其计算公式为
(2)
(3)
式中:N为观测值总数;
Ri,GNSS为根据GNSS和陆地固定站点数据通过事后精密处理获得的距离,将其作为距离真值;
Ri,Laser为激光测距仪实际测量值。平均偏差衡量的是激光测距仪测量值与真值之间的偏离程度,均方根误差衡量的是检测方法的可靠性。
为了检验新激光测距仪精度检测方法的有效性,对手持激光测距仪实测值进行了检测。激光测距仪测量距离差值随时间变化的情况如图4所示。
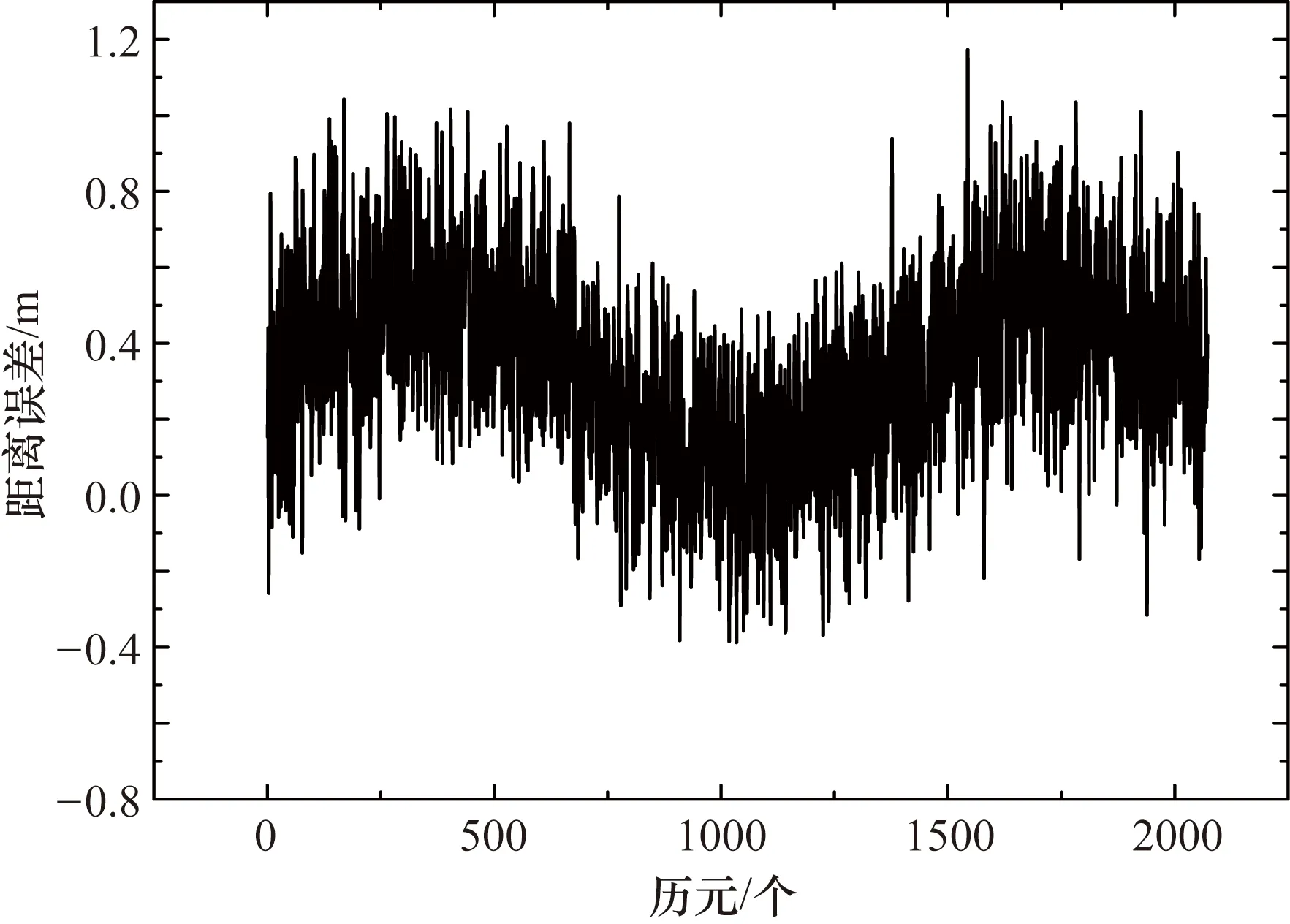
图4 激光测距仪精度检测结果
从图4中可以看到,激光测距结果与GNSS动态精密单点定位结果相差在厘米至分米量级。总体上,两者差值的RMS在0.5 m以内。以上结果基本反映了米级精度的激光测距仪的测距能力,证明了方法的正确性。
针对激光测距室内检测方法需建立激光测距标定环境或者拆装后到指定机构进行测距仪的标定以及校飞方法组织协调困难等问题,提出了一种新的船载激光测距仪动态测距精度检测方法。该方法在船舶出航时,实时跟踪陆地固定的激光合作目标,同时利用船载GNSS设备,采用GNSS动态精密单点定位的方法检测激光测距仪测距精度,实现了激光测距仪的动态精度检测,有效克服了传统检测方法需拆装、组织困难等问题。最后,利用船载实测数据对该方法的有效性进行验证,结果表明:即使考虑各种误差的综合影响,GNSS动态精密单点定位精度可达到11 cm。下一步将对GNSS动态精密单点定位天向的定位精度进行进一步优化,从而提高激光测距仪动态精度检测的可靠性。
猜你喜欢 单点高精度动态 国内动态卫星应用(2022年7期)2022-09-05单点渐进无模成型的回弹特性汽车实用技术(2022年11期)2022-06-20国内动态卫星应用(2022年3期)2022-05-23国内动态卫星应用(2022年1期)2022-03-09动态环球慈善(2019年6期)2019-09-25基于Niosll高精度超声波流量计的研究电子制作(2018年17期)2018-09-28高精度PWM式DAC开发与设计智富时代(2018年8期)2018-09-28高精度PWM式DAC开发与设计智富时代(2018年8期)2018-09-28高抗扰高精度无人机着舰纵向飞行控制北京航空航天大学学报(2017年9期)2017-12-18单点的梦想作文与考试·小学高年级版(2017年16期)2017-08-14推荐访问:精度 检测方法 动态