抓料机工作装置系统设计
来源:软件设计师 发布时间:2023-04-08 点击:
谭志行,吕兴业
(广西柳工机械股份有限公司,广西柳州 545007)
工作装置是抓料机的主要组成部分之一,承担着主要作业任务。工作装置可靠性的保证是抓料机正常工作的必要条件。目前针对抓料机工作装置设计计算的资料较少,针对工作装置结构件强度校核工况尚停留在经验设计阶段。本文结合某抓料机开发实例,系统阐述了抓料机工作装置设计基本思路和流程。对工作装置结构件采用截面强度普查法查找危险工况进行阐述,同时利用VB 可视化编程功能,实现流程计算程序化,提高产品开发效率。
1.1 作业参数定义
抓料机作业参数主要包括最大抓取高度、最大抓取深度、最大抓取半径、最大半径时的抓取重量。作业参数的定义应能满足实际作业需求,此外也可采用横向、纵向对比方式。作业参数一般做为工作装置设计的输入项,工作装置的设计应能满足作业参数要求。
1.2 主要参数确定
根据作业参数定义,通过放样确定以下主要参数:动臂长度、斗杆长度、动臂最大转角、动臂最小转角、斗杆最大转角、斗杆最小转角。抓料机一般配置有直动臂和弯斗杆,有利于提高整机的抓取高度。通过实际放样得出的某机型抓料机的作业范围如图1 所示。
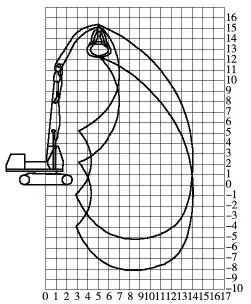
图1 作业范围
抓料机的另一个重要参数为起重重量,抓料机起重重量主要受以下4 个因素影响:①动臂油缸的主动提升力;
②斗杆油缸的闭锁能力;
③整机稳定性;
④抓斗的闭锁能力。对于其他属具起吊的情况,也可不考虑抓斗闭锁力。
由于抓斗端载荷方向一般为竖直向下的,可不必考虑地面附着力的影响。按照标准GB/T 13331—2014《液压挖掘机 起重能力测试方法》,抓料机的额定起重重量为:当液压极限状态为限制因素时,在特定载荷点的额定起重重量为最大计算起重重量的87%;
当静载倾翻极限状态为限定因素时,额定起重重量为最大计算起重重量的75%。
根据以上条件分别计算3 种限制条件下的额定起重重量,整机额定起重重量由三者中的最小值确定。某机型抓料机整机起重能力如图2 所示。
通过图2 可以看到各个限制因素对起重能力的影响。整机稳定性限制区域为A 区,占整个作业区域约60%;
动臂油缸主动提升力限制区域为B1 和B2 区域,占整个作业区域约20%;
斗杆油缸闭锁力限制主要分布于C1 和C2 区域,占整个作业区域约20%。通过对比与分析,对相关参数进行改进,可使3 种限制因素达到较好的匹配,同时也为改善特定区域的起重能力提供了改进思路。

图2 整机起重能力
按图3 对抓料机工作装置结构强度进行计算。
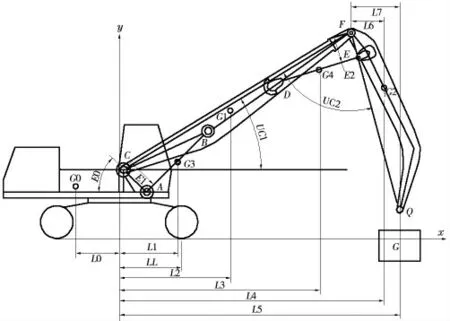
图3 工作装置结构
其中:G0~G4 分别为主机重量、动臂重量、斗杆重量、动臂油缸重量和斗杆油缸重量。G 为起重重量,由整机稳定性、动臂油缸主动提升力、斗杆油缸闭锁力限制因素共同决定。E1、E2 分别为:动臂油缸对C 点作用力臂、斗杆油缸对F 点作用力臂。UC0、UC1、UC2 分别为AC 线与水平面夹角、动臂与水平面夹角、斗杆与动臂夹角。L0~L7 分别为对应距离尺寸。
结构强度主要计算流程:①由UC1、UC2 确定工作装置姿态;
②由整机稳定性条件,计算起重重量G_1;
③由整机稳定性条件,计算起重重量G_2;
④由整机稳定性条件,计算起重重量G_3;
⑤由min(G_1、G_2、G_3)得出起重重量G;
⑥由G 反算各个绞点作用力;
⑦由各个绞点作用力校核动臂、斗杆强度。
在实际结构校核的过程中,由于抓料机的作业工况和挖掘机作业工况存在较大差别,很难直接将挖掘机的计算工况直接应用于抓料机结构校核中。而工况的选取对计算结果影响很大,在整个起重范围内,很难选取某一固定的工况做为极限工况。采用应力普查法确定极限工况是结构校核的常用方法。
所谓应力普查法,就是通过对不同姿态下对动臂、斗杆截面的应力进行计算,通过筛选得出各个截面最大应力时的姿态,最后再根据这些姿态进行载荷计算、结构件强度校核的方法。应力普查截面分布如图4 所示。
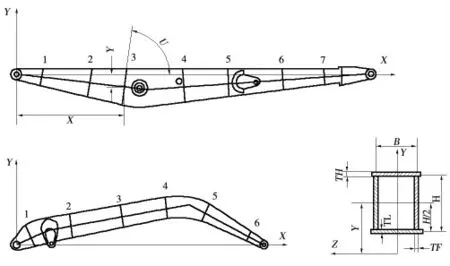
图4 应力普查截面分布
主要参数包括:①X、Y 为截面形心的坐标值;
②B、H 为截面宽度和高度;
③U 为截面与X 轴正向夹角;
④TH、TL、TF 分别为上翼板、下翼板、腹板厚度。
通过以上参数可以分别计算截面面积S(用于拉压应力的计算)、Z 轴主惯性矩Jz(用于弯曲应力计算)。
以斗杆截面5 为例,介绍如何用断面法计算其正载时截面应力(图5)。
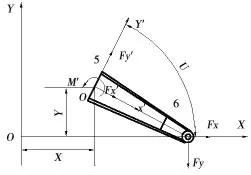
图5 截面应力
其中:Fx、Fy 为Q 点绞点力在斗杆坐标下的X 和Y 分量。
通过截面5 形心新建坐标系X′O′Y′,Y′方向与截面方向重合,X′方向为上翼板与下翼板角平分线方向。
将Fx,Fy 按力的等效变换原则平移至O′处,得出Fx′、Fy′、M′。Fx′使截面产生拉压应力,Fy′使截面产生剪应力,M′使截面产生弯曲应力。考虑到工作装置的长悬臂特性,剪应力一般数值较小,同时截面剪应力的最大值一般位于截面中部,与弯应力的最大值刚好错开,所以一般可忽略Fy′产生的剪应力。最后可通过应力的合成法则和第四强度理论计算等效应力。其他截面均可在绞点力已知的情况下采用相同办法计算得出。
将动臂转角和斗杆转角分别划分为N1 和N2 等份,分别计算每个姿态下动臂、斗杆各个绞点的力,然后采用断面法分别计算动臂、斗杆各个截面的应力值。当所有姿态下各个截面的应力值均计算出来后,再筛选动臂、斗杆每个截面最大应力值及其对应的姿态。最后将筛选的姿态作为极限工况对动臂、斗杆进行结构校核。
由于计算步骤多、计算量大,可以按以上设计思路将计算流程编写成计算机程序,方便后续同类产品设计与对比。在此采用VB 作为编程工具,同时由于在计算中要用到较多的图形交互内容,这里采用dxf 文件作为图形输入和输出的文件。工作装置计算程序预览界面如图6 所示。
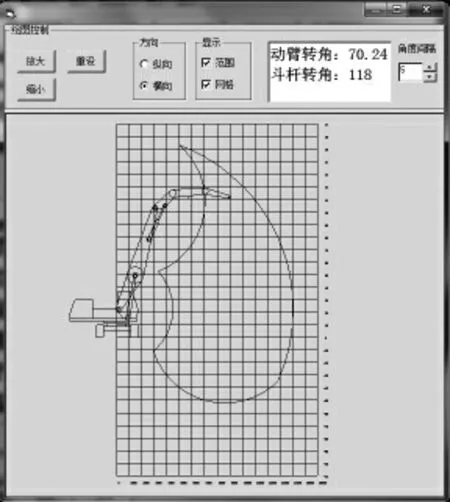
图6 计算程序预览界面
工作装置计算程序可以输出整机起重能力图表、各个姿态下的绞点力值、截面普查结果、各姿态下的截面应力值等。
通过以上计算筛选出极限工况姿态,并通过特定截面应力计算,得到部分截面的应力值。为了解整个动臂、斗杆结构的应力分布,同时验证计算程序的正确性,有必要对结构件进行有限元分析。某机型抓料机动臂有限元分析结果如图7 所示。
图7 有限元计算结果
本文通过对抓料机工作装置结构设计主要流程的阐述,指出设计计算中应关注的要点。并通过对采用截面应力普查法对极限工况进行查找的方法讨论,很好地解决了结构强度校核中工作姿态的选用问题。同时通过将计算流程固化为专门针对抓料机工作装置计算程序,极大提高设计效率,为后续同类产品开发打下坚实的基础。
猜你喜欢动臂校核油缸发电机进相试验失磁保护与低励限制配合关系的校核大电机技术(2022年5期)2022-11-17热轧弯辊油缸密封改进冶金设备(2020年2期)2020-12-28反铲六连杆装载机动臂的有限元分析及拓扑优化科学技术创新(2020年32期)2020-11-05挖掘机动臂升降系统故障分析与排除消费导刊(2020年1期)2020-07-12通行费校核分析方法探究中国交通信息化(2020年12期)2020-02-06基于卫星遥感图像的收费站位置自动识别与校核中国交通信息化(2019年7期)2019-10-08FPSO火炬塔海运绑扎方案及强度校核船舶标准化工程师(2019年4期)2019-07-24碳纤维复合材料在液压油缸中的应用纤维复合材料(2018年2期)2018-12-07负流量系统液压挖掘机动臂掉臂故障分析建筑机械(2018年11期)2018-11-22基于装载机动臂焊接失效及预防措施浅析金属加工(热加工)(2018年10期)2018-10-26推荐访问:装置 料机 设计