抛物面天线自动倒竖/展收机构设计
来源:软件设计师 发布时间:2023-04-28 点击:
潘加松,陈 伟,王 申,刘业龙
(中国船舶集团有限公司第八研究院,南京 211153)
随着现代微波探测技术的发展,对天线设备的机动性需求越来越高,天线往往要安装在越野载车平台上[1]。为满足载车机动性需求,大型天线须分块设计,通过展收折叠机构[2]实现天线工作状态和运输状态的转换。液压系统是结构动力和运动传递的重要执行结构,它具有刚度大、响应快、调速范围宽、适合重载直接驱动等特点。本文介绍一种采用全液压驱动的抛物面展收天线设计方法,天线载荷和主要结构件计算仿真结果表明,天线和液压系统设计能够满足机动性使用需求,为大型复杂机动型天线提供了基础性设计思路,具有普遍适用性。
1.1 天线组成
天线主要由反射体、主块倒竖机构、边块展收机构、天线运输锁定机构等组成,如图1所示,采用三路阀控箱和运动控制单元实现天线的自动倒竖和展收。
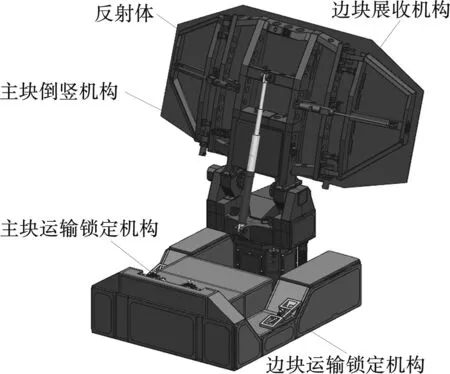
图1 天线组成示意图
1.2 主块倒竖机构设计
主块倒竖机构使天线反射体在工作和运输状态完成120°旋转位置转换,竖起到位后通过锁定油缸锁定。主块倒竖机构组成如图2所示。
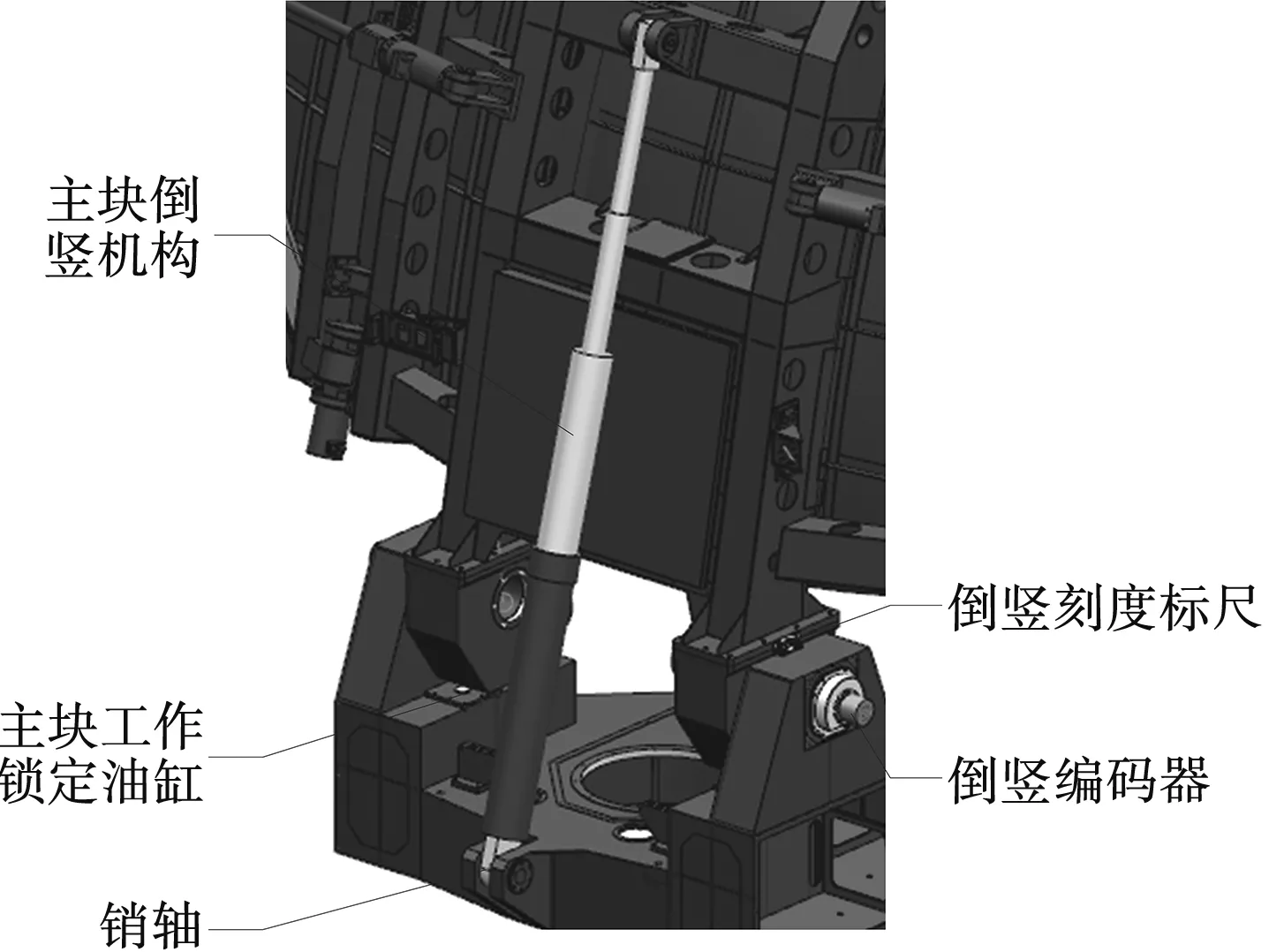
图2 主块倒竖机构组成示意图
主块倒竖机构采用液压缸,缸体安装在转盘上,液压缸自带过载保护和机械保护,在极限位置设置传感器和限位块,防止运动超限,保证天线及执行机构的安全性。
主块倒竖机构采用高精度轴角编码器[3]实时测量天线的运动角度。在天线转轴处设计有刻度标尺,用于目测天线的旋转角度。
主块竖起到位后,主块工作锁定油缸自动伸出锁定,保证主块起竖角度。
1.3 边块展收机构设计
边块展收机构使反射体边块在工作和运输状态完成106°旋转位置转换,展开到位后通过锁定油缸锁定。边块展收机构如图3所示。

图3 边块展收机构示意图
边块展收机构采用液压缸,缸体安装在背架上。液压缸自带过载保护和机械保护,在极限位置同样设置传感器和限位块。
边块展收转轴内支耳安装自润滑轴承,外支耳安装万向球轴承,同时对轴承位置进行密封防护设计。
边块展开到位后,边块工作锁定油缸自动伸出锁定,保证抛物面整体精度。
1.4 运输锁定机构设计
主块、边块运输锁定机构在天线运输过程中对天线进行辅助支撑及锁定,保证天线结构安全。主块支撑架与天线背架主块间通过锲形配合限位;
在接触面间安装聚四氟乙烯结构块,在聚四氟乙烯块下方采用航空橡胶板进行减振。
主块、边块运输锁定机构皆由液压油缸推动锁销锁定,设计安装位置传感器,能够在输出锁定和解锁两种位置状态信号时,避免误操作产生破坏。运输锁定机构结构如图4所示。

图4 运输锁定机构示意图
主块运输锁定机构限制主块上下位置自由度,因此背架主块上配合销孔为腰形孔,便于用弹性材料进行减振补偿设计。
天线工作时主要承受风载荷、重力载荷和偏心载荷的作用[4],为确定执行机构驱动力和行程,分别对主块倒竖负载和边块展收负载进行计算。
2.1 主块倒竖负载
天线从倒伏状态开始举升时,天线绕O点旋转,主块液压缸绕A点旋转,推杆顶点由B点运动到B′点,如图5所示,OB和OB′为天线轮廓,AB和AB′为主块液压缸轮廓。
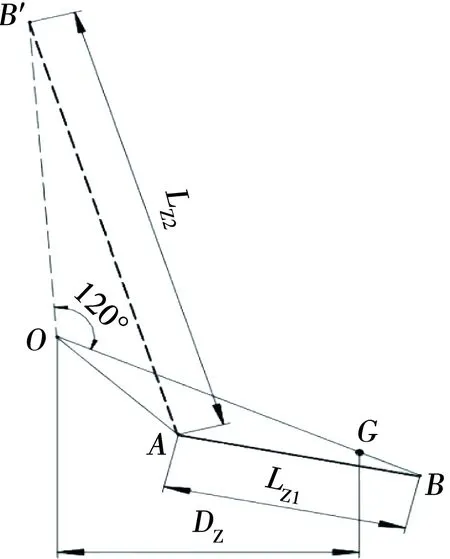
图5 主块倒竖机构设计原理图
主块倒竖风阻力为
(1)
式中,Cx=1.6为风阻力系数;
S为迎风面积;
ρ=1.25 kg/m3为空气密度;
v=20 m/s为风速。
主块倒竖风力矩为
MfZ=FfZDZ
(2)
式中,DZ为天线重心到转轴的水平距离。
主块倒竖自重为
GZ=mZg
(3)
式中,mZ为天线重量;
g为重力加速度。
重力不平衡力矩为
MZ=GZDZ
(4)
求得反射体主块所受载荷如表1所示。

表1 主块载荷计算结果
倒竖力综合为
FZ=FfZ+GZ=11 040 N
(5)
倒竖力矩综合为
MF=MfZ+Mz=13 248 N·m
(6)
倒竖功率为
(7)
式中,nZ为转速,r/min。
倒竖行程LZ=LZ2-LZ1,圆整后LZ=1 200 mm。
倒竖最大轴向力为
(8)
式中,vZ为主块推杆速度。
综上,考虑倒竖力平衡及设计余量,主块倒竖油缸轴向力不小于20 000 N。
2.2 边块展收负载
边块从收起状态开始展开,边块反射体绕O点旋转,边块液压缸绕A点旋转,推杆顶点由B点运动到B′点,如图6所示,OB和OB′为天线轮廓,AB和AB′为边块液压缸轮廓。边块反射体所受载荷如表2所示。
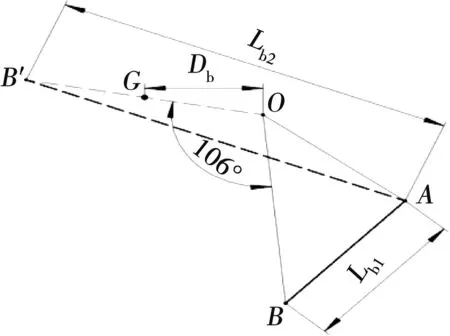
图6 边块展收机构设计原理图
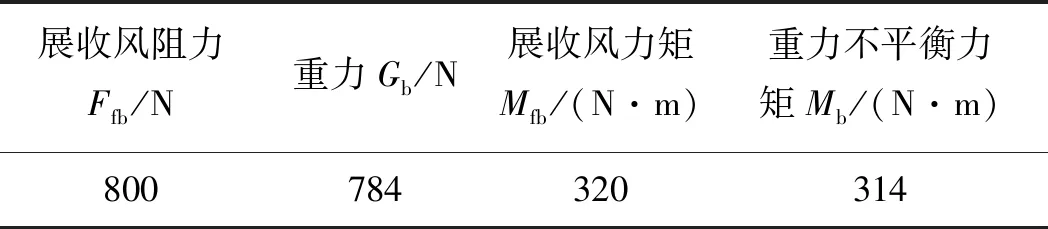
表2 边块载荷计算结果
边块展收力综合为
FB=Ffb+Gb=1 584 N·m
(9)
边块展收力矩综合为
MB=Mfb+Mb=634 N·m
(10)
边块展收功率为
(11)
式中,nB为转速,r/min。
边块展收行程Lb=Lb2-Lb1,圆整后Lb=800 mm。
边块展收最大轴向力为
(12)
式中,vB为边块推杆速度。
综上,考虑展收力平衡及设计余量,边块展收油缸轴向力不小于2 000 N。
3.1 组成及原理
液压系统包含阀组、执行油缸、管路3部分[5],液压系统原理如图7所示。
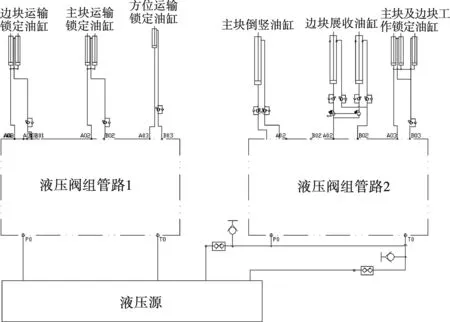
图7 液压系统原理图
3.2 液压系统主要参数
液压执行系统主要参数见表3。根据第2节计算结果,确定油缸主要参数如表4所示。
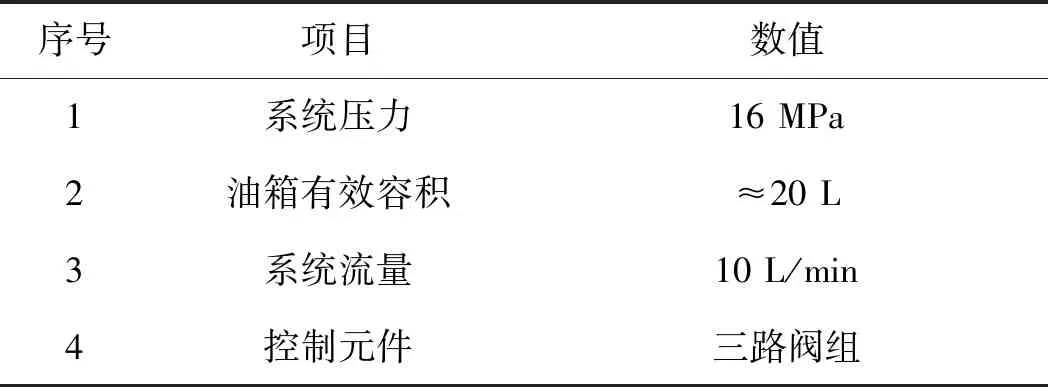
表3 液压执行系统主要参数
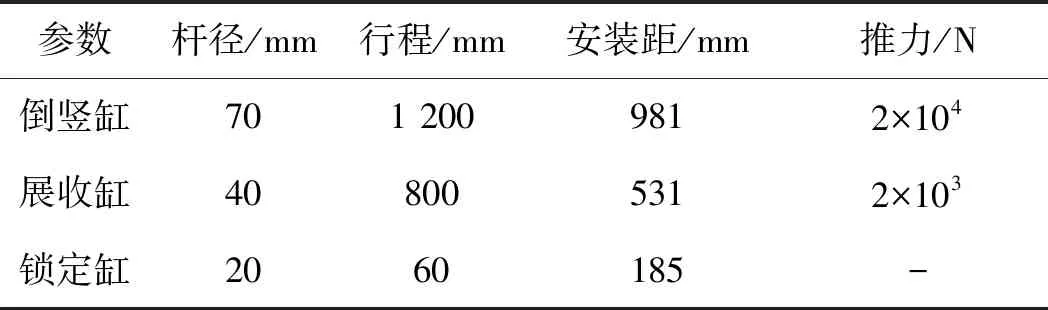
表4 执行油缸主要参数
天线反射体背架是天线的主要承载结构件,采用钢板材框架结构焊接成型,其刚强度直接关系到天线的性能。为保证天线不同工况下的使用需求,需要对背架进行有限元仿真分析[6]。材料属性赋值时,密度为ρ=7.85×103kg/m3、弹性模量为E=2.05×1011Pa,泊松比为γ=0.3。
4.1 边块背架静力学分析
对边块背架实际模型进行简化,五根梁都在同一平面内,梁截面为槽型,壁厚4 mm,支耳孔轴线水平,材料全部为钢steel。
在5根梁的3个侧面划分2D网格,类型CQUAD4,默认厚度4 mm,单元大小5 mm。
对6个支耳实体划分3D四面体网格,类型CTETRA(4),单元大小6 mm。建立相邻零件之间的1D连接,类型选择边到面。选择6个支耳圆柱面,释放Y轴旋转自由度,其余自由度固定。-Z方向施加风力2 500 N(不破坏),添加重力加速度。
对仿真模型进行求解,位移和应力结果如图8所示。

图8 边块背架位移和应力云图
4.2 主块背架静力学分析
对主块背架实际模型进行简化,梁截面为槽型,壁厚5 mm,对14个支耳拆分体,材料全部为钢steel。
选择14根梁的3个侧面划分2D网格,类型CQUAD4,默认厚度5 mm,单元大小6 mm。
选择底部法兰的上表面划分2D网格,类型CQUAD4,默认厚度5 mm,单元大小6 mm。
对背面6个支耳和侧面8个支耳划分3D四面体网格,类型CTETRA(4),单元大小5 mm。建立相邻零件之间的1D连接,类型选择边到面。在左右边块的重心位置设置2个关联点,建立关联点和侧面支耳圆柱孔面的1D连接。选择底部法兰面和背面中间2个支耳圆柱孔面施加固定约束。-Z方向施加风力5 880 N(不破坏),2个关联点上分别施加边块重力600 N和风力1 960 N,添加重力加速度。
对仿真模型进行求解,主块背架位移和应力结果分别如图9所示。
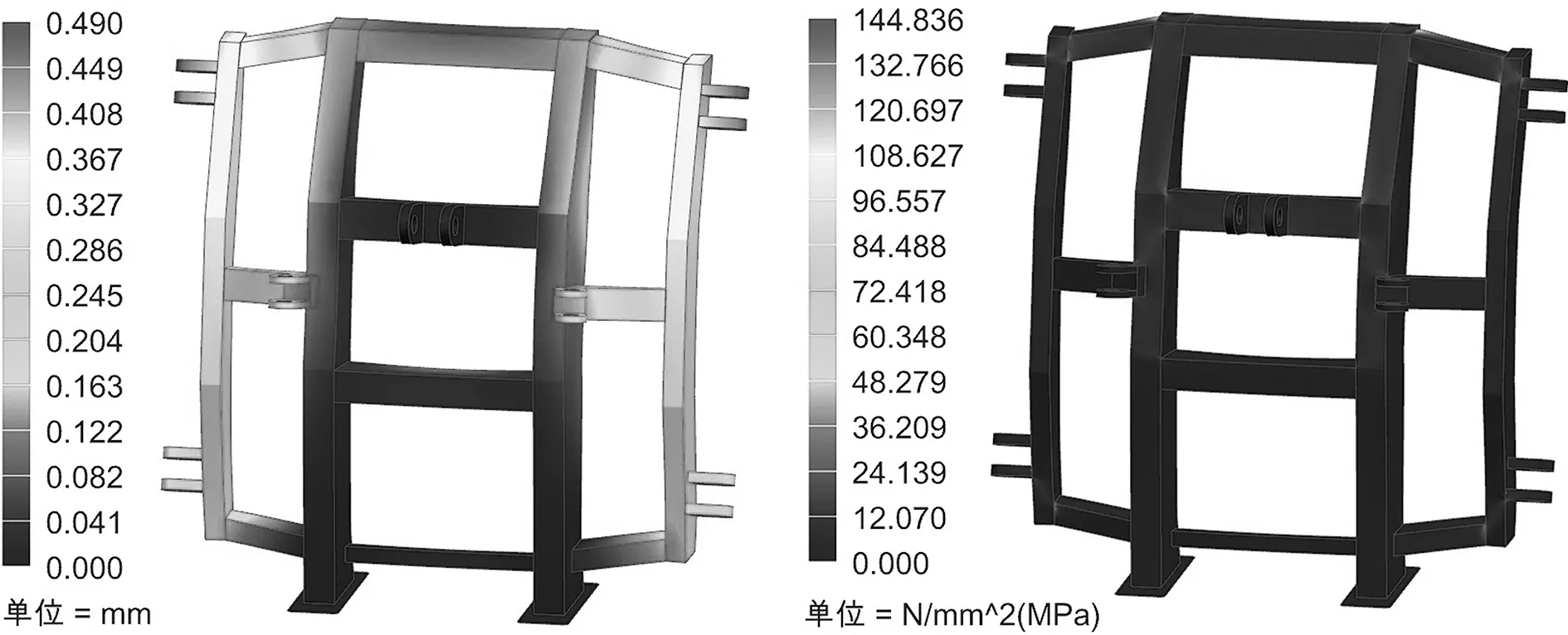
图9 主块背架位移和应力云图
4.3 天线背架分析结果
不破坏时,边块背架的最大应力为11 MPa,发生在最外侧纵梁背面;
边块背架的最大位移为0.05 mm,发生在最外侧纵梁下部。主块背架的最大应力为144.8 MPa,发生在主块背架的顶部;
主块背架的最大位移为0.49 mm,发生在主块侧边支耳处。天线背架材料屈服极限约为σs=235 MPa,天线背架刚强度满足使用要求。
本文从满足机动性角度设计了一种自动液压展收天线,采用全液压动力实现主块倒竖、边块展收及天线锁定;
计算了天线载荷,确定了执行油缸的主要参数;
对天线背架进行了有限元分析,采用2D壳单元和3D实体单元联合网格对分析对象进行简化,分析结果验证了天线结构设计的安全性,为大型机动型天线的设计提供了具体解决思路,具有普遍适用性。