道岔磁栅位移传感器的设计
来源:软件设计师 发布时间:2023-04-15 点击:
周近杰,郭彦青,段志强,于腾飞,王 超
(中北大学机械工程学院,山西 太原 030051)
道岔及转换系统是轨道交通必不可少的基础设备,是进行铁路线路变更的转换设备,也是工务线路中技术最复杂的设备之一,其可靠性成为影响铁路运行安全的重要因素之一[1-3]。转辙机是道岔控制系统中的执行机构,主要用于道岔转换、锁闭,反映道岔尖轨所处的位置[4]。现阶段主要通过测量与道岔尖轨连接的转辙机拉杆的位移来判断尖轨的位置,但目前广泛使用的光栅式直线位移传感器加工工艺复杂,对光、灰尘和振动敏感,无法应用于道岔环境[5-6];
线性差动变压器式(linear variable differential transformer,LVDT)位移传感器线性范围小、信号调理电路复杂[7]。磁栅式位移传感器由于其具有结构简单、响应速度快且不易受尘埃影响等优点,可以兼顾精度和量程要求,且其测量方式为非接触式测量[8-9],故本文选用磁栅位移传感器进行转辙机拉杆位移测量。
转辙机拉杆的位移检测能够间接反映轨道变换后道岔尖轨与基本轨的贴合程度,对行车安全有重大意义,因此诸多技术人员对此进行了大量研究。文献[10]~[11]提出了一种视觉方法来检测转辙机拉杆位移,该方法较为先进,但目前无法集成到转辙机内部,其小型化问题还有待解决;
文献[12]提出了单块永磁体的磁感应强度表达式,为单块永磁体的空间磁场描述提供了数学模型;
文献[13]对圆型磁编码器进行了研究,其研究结果可为直线磁栅传感器标尺编码提供一定借鉴;
文献[14]分析了霍尔元件距永磁体距离和永磁体节距对磁栅传感器响应信号的影响,不过未对响应信号的处理算法进行研究。
本文依据铁路部门有关单位的要求研制了一种专用于道岔的磁栅位移传感器,建立了三维空间的磁栅标尺磁场模型,推导出空间任一点的磁场强度表达式,分析了安装误差与振动导致的磁栅敏感探头偏离标尺中心的情形,同时对磁栅响应信号函数与处理算法进行了研究,从根本上解决了磁栅传感器研发过程中定量分析的难题,为道岔传感器在复杂环境下的优化提供理论支撑。
道岔磁栅位移传感器将磁栅标尺镶嵌于转辙机拉杆上,其磁极为交替N/S排列,磁栅敏感探头通过感测磁场强度变化计算出转辙机拉杆的位移,因此研究N/S极交替排列的磁场分布具有十分重要的意义。
根据安培分子电流假说,组成磁铁的最小单元分子等物质内部存在环形电流,即分子电流,故磁栅标尺外部三维空间中任意一点的磁场由标尺内排列整齐的分子电流共同激发,而由于均匀磁化体内分子电流的效应相互抵消, 因此磁栅标尺在宏观上表现为只有表面电流而无内部体电流的存在[15],这样可以认为外部空间中任意一点的磁场仅由表面闭合电流环路ABCDA(图1)所激发:
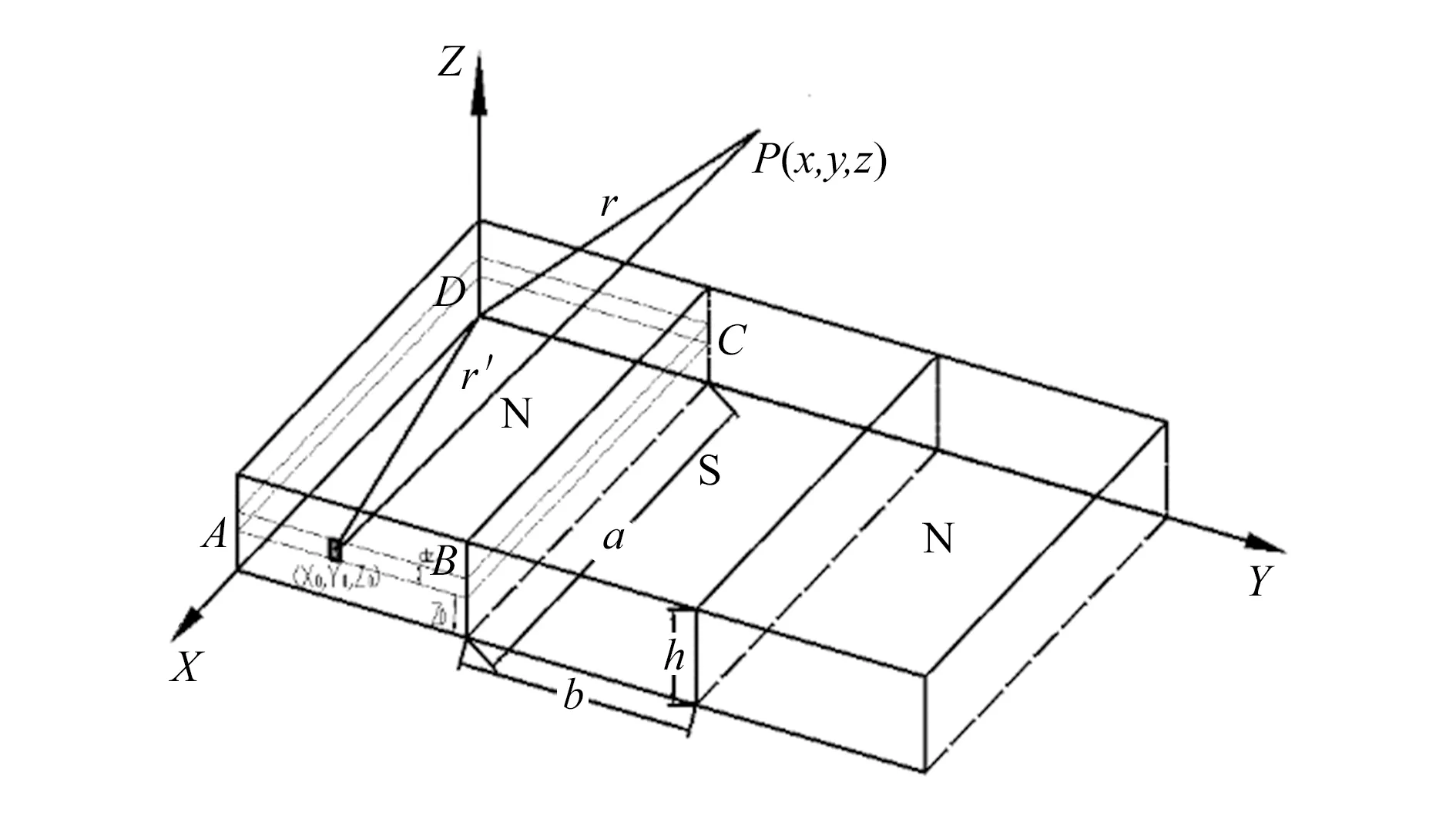
图1 磁栅标尺对空间任一点磁场强度模型
(1)
式中:B为空间任意一点磁场强度;
I为微圆环带磁化电流;
dl为电流元;
r为场点矢径;
r′为源点矢径;
μ0为真空磁导率。
取厚度为dz0的微圆环带,其在任一点P(x,y,z)产生的磁场强度dBP为:
dBP=dBPx+dBPy+dBPz
(2)
式中:dBPx,dBPy,dBPz分别为空间一点P的磁场强度在x,y,z方向上的分量。
微圆环带由AB,BC,CD,DA4段电流构成,其在x,y,z方向上的投影可以分别写成四段电流在其坐标轴上的投影分量之和,表达式如下:
dBPx=dBABx+dBBCx+dBCDx+dBDAx=
(3)
dBPy=dBABy+dBBCy+dBCDy+dBDAy=
(4)
dBPz=dBABz+dBBCz+dBCDz+dBDAz=
(5)

当永磁体N/S交替排列时,N与S极宏观分子电流方向相反,由于篇幅有限,此处仅给出磁场强度各分量的推导结果。
(6)
(7)
(8)

由上述模型可以发现,磁栅传感器空间任一点P(x,y,z)的磁场强度与磁栅标尺的环电流密度即磁栅本身的磁化强度相关。为探究敏感探头偏离磁栅标尺中心时对所感应到的磁场强度的影响,在Ansoft Maxwell建立磁栅标尺模型并进行仿真分析。
为直观显示磁栅标尺磁场分布,在Ansoft Maxwell仿真平台建立如图2所示的磁栅标尺三维模型,标尺上永磁体采用N/S排列,充磁方向为坐标轴z方向,牌号为N52,性能参数为:剩磁Br=14.3 kGS,矫顽力Hcb=10 kOe,内禀矫顽力Hcj=11 kOe。
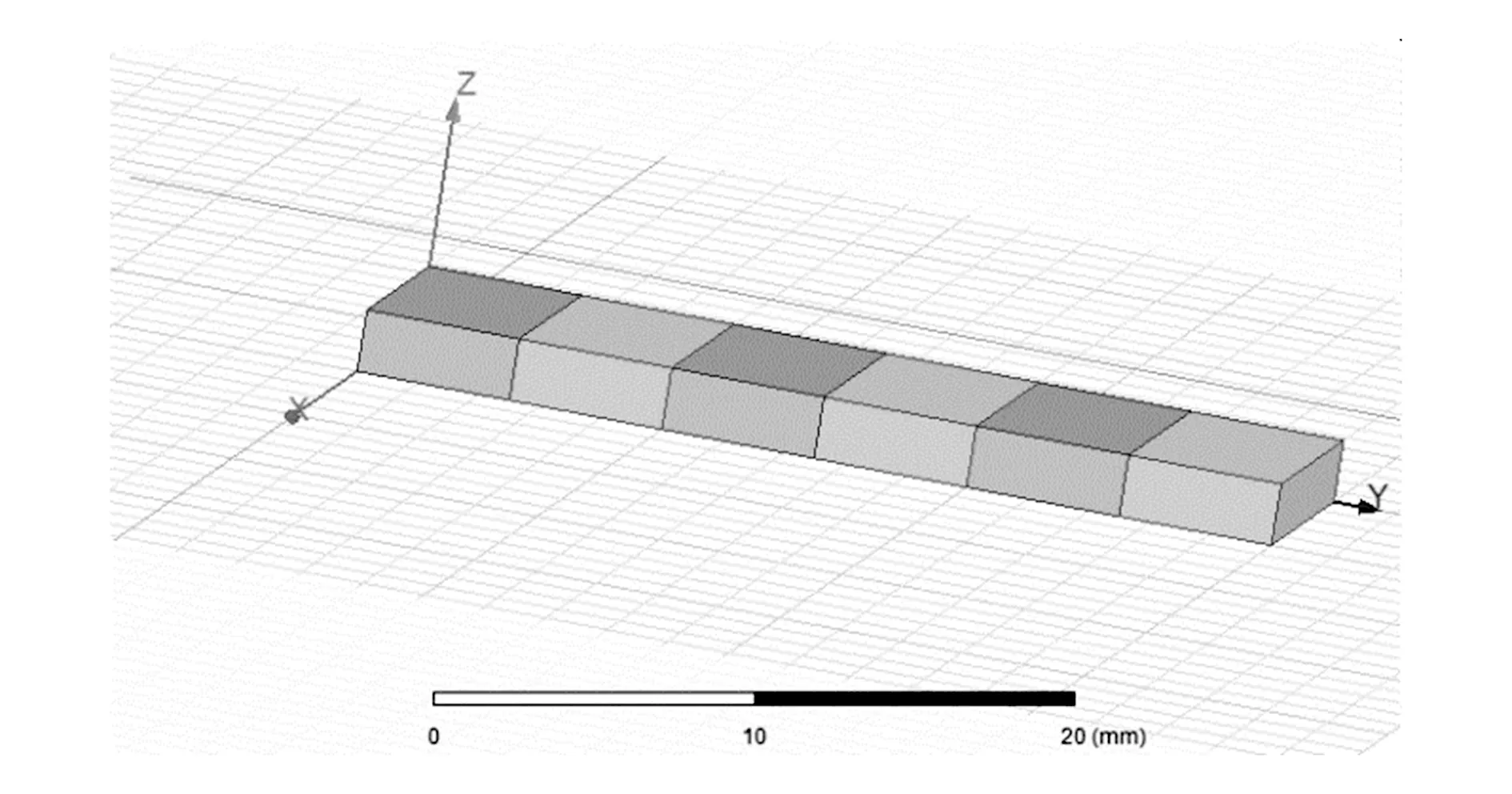
图2 磁栅标尺仿真模型
磁栅传感器现场安装时很难保证霍尔芯片在磁栅标尺的中心位置,如图3所示,以本模型为例,即无法保证霍尔中心在X=5 mm的位置,因此需探究X方向磁感应强度变化。模型中磁栅标尺为10 mm,利用参数化扫描,以步长为2.5 mm,从起点-2 mm处到终点12 mm处,通过仿真分析探究磁场强度随X变化而变化的趋势。从图4可以看出,当霍尔中心在标尺边缘位置时,磁感应强度接近于0 T,在磁条长度范围内(0~10 mm)X方向磁感应强度曲线基本一致,由此可知,安装误差导致敏感探头偏离中心位置时对磁感应强度的影响较小,在空间位置充足的情况下可将磁条标尺X方向加长以克服安装误差的影响。
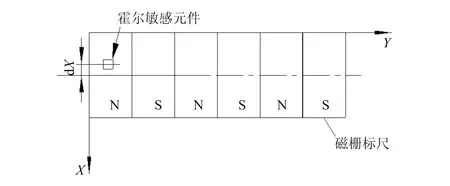
图3 安装误差偏移示意图
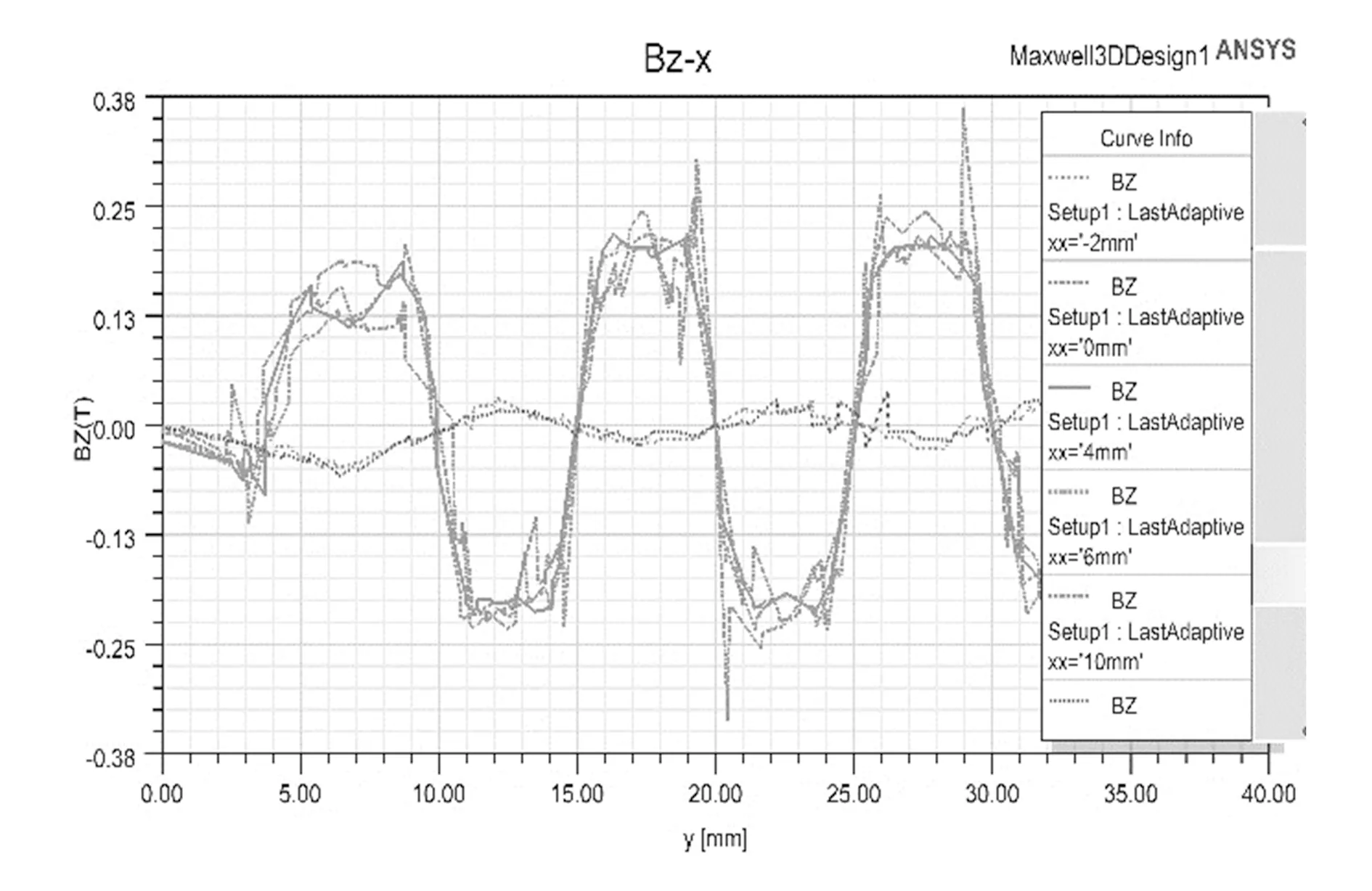
图4 标尺X方向不同偏移磁场强度曲线
铁路道岔磁栅位移传感器工作时,线性霍尔敏感探头固定,转辙机拉杆带动磁栅标尺做相对运动,使敏感探头产生周期响应。由于该周期响应满足狄利克雷(Dirichlet)条件,即一个周期中满足:1)有有限个一类间断点;
2)有有限个极值点;
3)信号绝对可积,因此敏感探头响应信号如下:
(9)
式中:f(t)为霍尔敏感元件响应值;
A0为响应直流分量;
k为响应包含的谐波个数;
w为信号角频率;
Ak为敏感元件响应的第k次谐波幅值;
θk为第k次谐波初相角;
t为时间。
在敏感探头响应表达式中,考虑到谐波通式Aksin(kwt+θk)是周期为2π的函数,当其幅值Ak、初相角θk确定以后,敏感探头响应值f(t)即唯一,由于其为1~∞的谐波函数,而为了提升传感器精度与响应速度,要求响应函数中只存在主要谐波,忽略次要谐波,因此需要分析主要谐波与次要谐波的关系。
3.1 磁栅传感器响应信号简化分析
由响应表达式(9)可知,当磁栅标尺与霍尔敏感探头确定后,霍尔敏感探头移动时的信号响应随即也确定下来。所研制的道岔传感器在测试台进行模拟运行,采集敏感探头经过磁栅标尺的响应信号,由于处理电路使用了高精度的A/D转化芯片,其信号为离散点,因此利用离散傅里叶变换得到各次谐波的幅值,其频谱图如图5所示。响应信号单周期采样点数为1 500,敏感探头响应函数的傅里叶变换为:
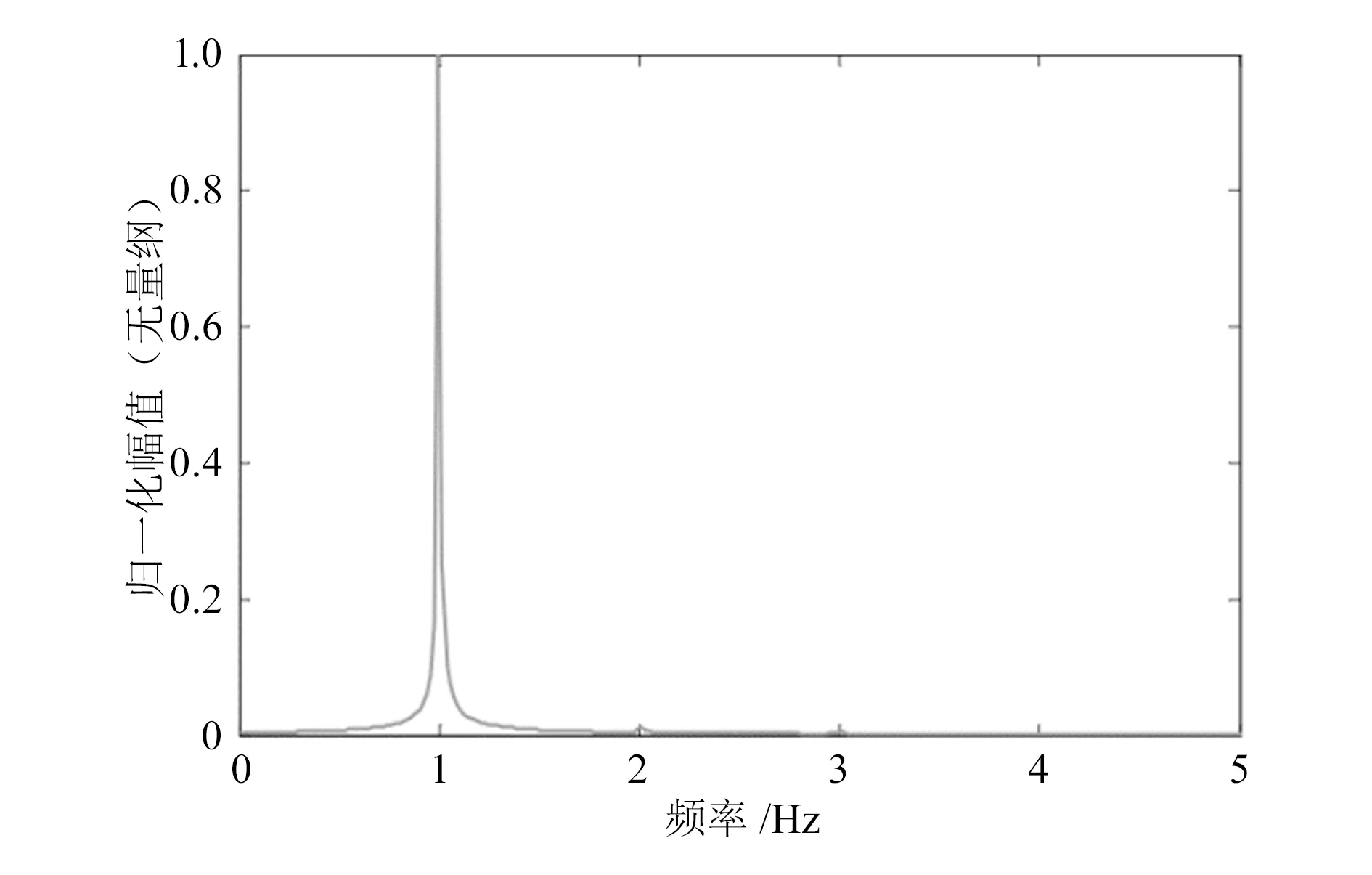
图5 响应信号频谱
(10)
式中:f(a)为采样之后的信号离散响应值,其长度为0~1 499;
F(m)为变换后的值。
经上述变换后敏感探头响应函数中主要包括1次谐波、2次谐波和3次谐波,其中1次谐波占较大比例。因此可以将传感器响应函数式(9)中的1次谐波到无限次谐波的叠加简化为仅含有1次谐波,其简化后的响应函数为:
f(t)≈A0+A1sin(wt+θ1)
(11)
3.2 响应信号电子细分法
现阶段由于加工工艺与成本原因,磁栅标尺节距无法做到很小,但对其精度要求却较高,因此通常在获得磁栅感应信号的基础上再采用电子细分技术来提高传感器精度。
在道岔传感器实际工作过程中,由于其振动较大导致感应幅值波动较大,因此采用不受幅值影响的正余切细分法进行电子细分。正余切细分法的原理是将传感器的响应信号进行分割求解,得到与相角相关的正余切值,从而间接确定位移。传感器间隔1/4栅距布置两个敏感探头,通过对两个敏感头所采集数据进行相除操作,得到对应角度的正余切值。两个正交的敏感探头随相角θ的响应分别为Asinθ和Acosθ,则相应的正余切值f(θ)求解如式(12)所示:
(12)
式中:A为敏感探头响应幅值。
根据式(12),在一个周期内求得的正余切曲线如图6所示。

图6 理论正余切曲线
在此基础上,可通过式(13)求出当前周期中相应角度值θ。
(13)
式中:Q为表1中的区域值。
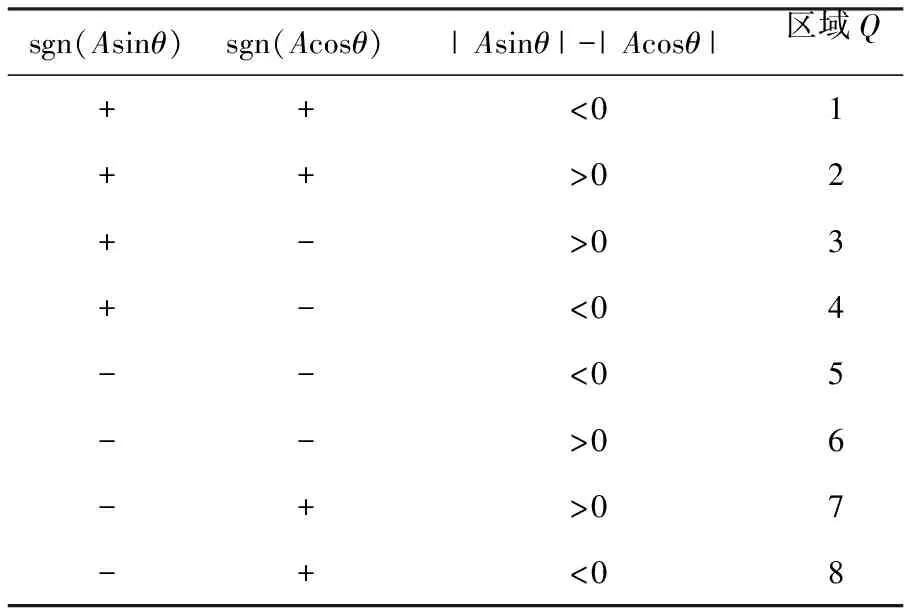
表1 周期信号区域分布
通过两个敏感探头响应信号的正负和绝对值的比较,可准确定位当前传感器处于一个周期8个区域中的哪一区域,实现粗定位,然后根据当前的正余切值定位敏感探头在该区域的准确位置,实现精定位,最终实现传感器的位移测量。正余切值与位移的对应关系如图7所示。
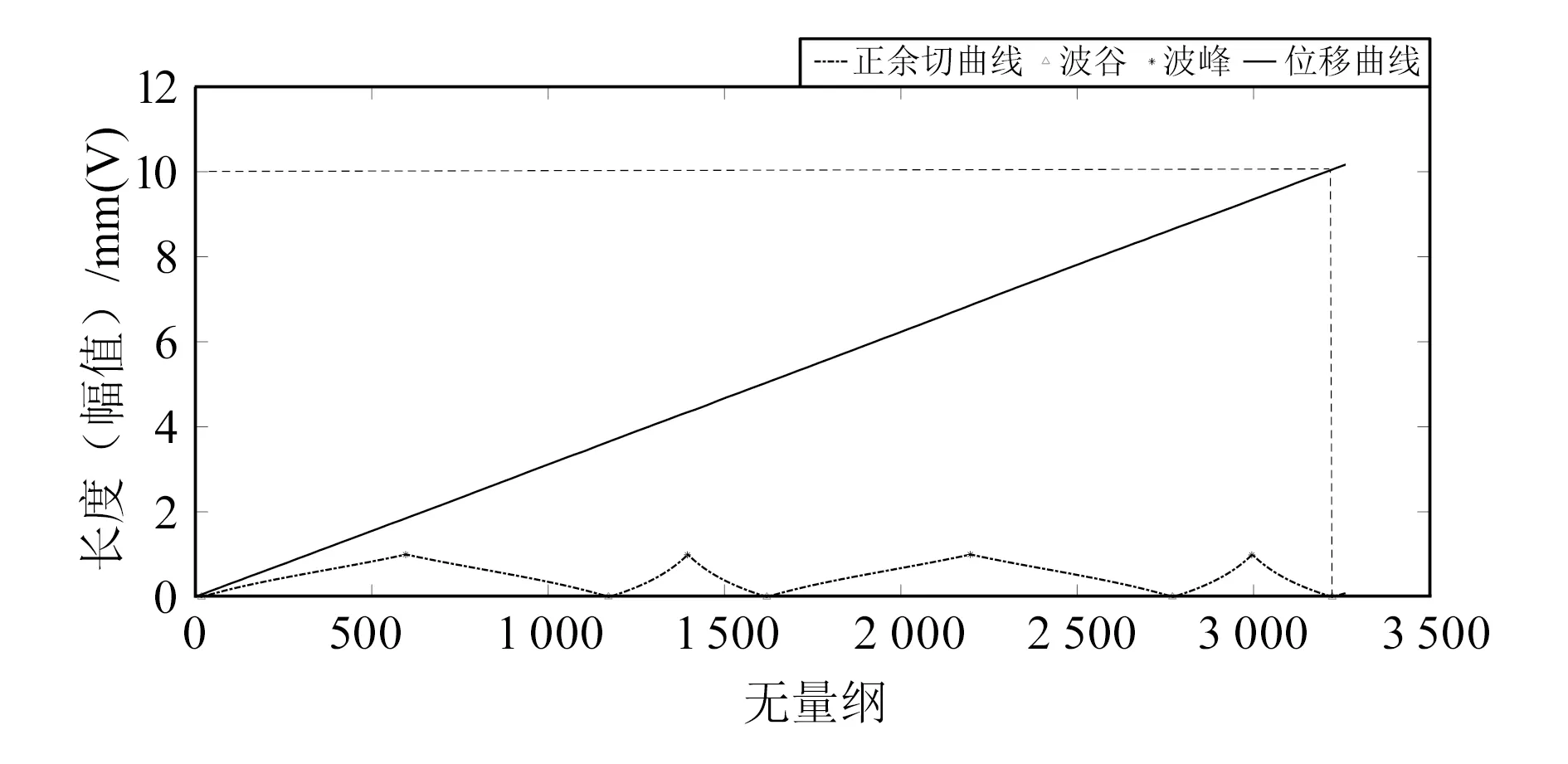
图7 正余切曲线与位移信号映射
依据磁栅传感器的工作原理结合转辙机的运动情况设计如图8所示的传感器,磁栅标尺采用SIKO的5 mm间距磁栅,敏感探头由两枚相隔1/4栅距的线性霍尔元件组成。
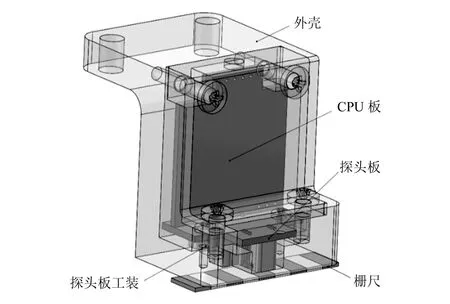
图8 传感器外形
道岔磁栅位移传感器硬件电路设计框图如图9所示。电源模块负责为其他模块进行配电,由于A/D模块、调理电路和敏感元件需要5 V电压,信号处理及细分模块需要3.3 V电压,同时需考虑过流及极性保护,因此整个电源模块由反接及过流保护、升压、单片机用电源、传感器用低纹波电压4部分组成。
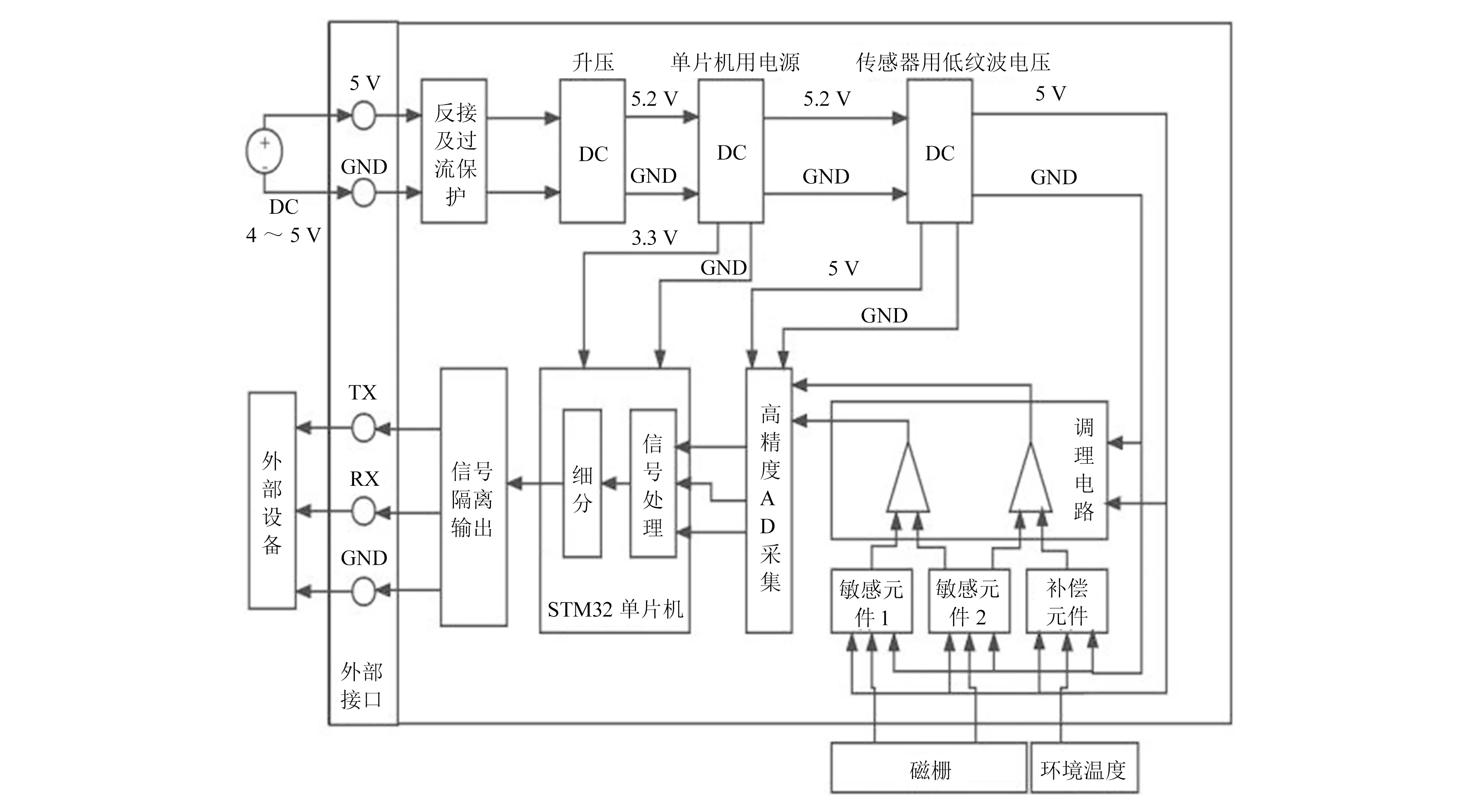
图9 内部电路框图
传感器电路模块直接驱动敏感元件,将磁栅标尺的位移动作变换为相应的电信号,输出到调理电路模块,实现位移到电信号的转换;
再通过调理模块将敏感探头采集的微弱信号放大,便于后续信号的处理和细分操作。信号处理及细分主要由单片机实现,经过相应滤波及去毛刺后,由专用的信号细分程序变换为相应的位移信息,该位移信息由信号隔离输出模块输出,信号隔离模块主要起到信号隔离和功率放大的作用。
在分析验证所设计磁栅位移传感器性能时,测试台是必不可少的装置,如图10所示。它承担两方面的任务:1)磁栅位移传感器的标定试验;
2)测试磁栅位移传感器的性能指标,包括对其稳定性与寿命的测试。
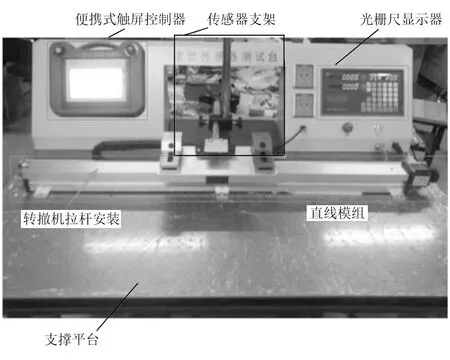
图10 传感器测试台
转辙机实际工作时道岔磁栅位移传感器固定,转辙拉杆做往复运动,试验台为模拟工况设计了道岔磁栅位移传感器支架,将转辙机拉杆固定于直线模组上做往复直线运动,同时直线模组内部安装了SINO KA-300光栅标尺,其分辨率为1 μm,所设计传感器以此为基准测试精度,便携显示屏可实时显示与记录传感器信息。
经该试验台连续测试48 h后,所得其误差曲线如图11所示,由图可知,磁栅标尺与光栅标尺的误差为-5~5 μm。因为光栅标尺的测量分辨率为1 μm,所以磁栅标尺的测量精度为±6 μm。
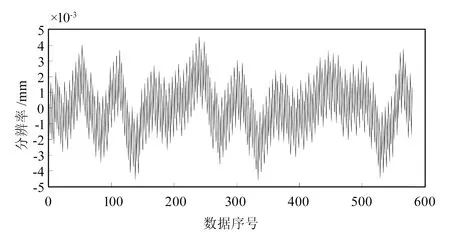
图11 误差曲线
本文设计了一款专用于转辙机拉杆位移检测的高精度磁栅位移传感器,建立了磁栅型传感器的磁栅标尺三维模型,同时对安装误差对传感器信号的影响做了探究,针对铁路转辙机的特殊内部构造,设计了独特的Z字形传感器外壳,同时设计了专用工装固定敏感探头,确保探头测量结果的一致性。通过精密的数学处理算法,实现了位移测量的准确性。磁栅传感器的测量精度为±6 μm,满足铁路道岔位移测量的精度指标要求,具有较高的性价比。
猜你喜欢转辙机标尺磁场强度如何立起廉洁自律硬标尺?今日农业(2021年11期)2021-11-27一种新型交流转辙机控制电路在地铁中的应用铁道通信信号(2020年3期)2020-09-21S700K-C转辙机防水解决方案探讨铁道通信信号(2020年1期)2020-09-21学好党章,立好“四个标尺”公民与法治(2020年3期)2020-05-30关于医用磁共振成像系统(MRI)磁场强度建标商品与质量(2019年47期)2019-06-18“李云龙式”干部如何发现,怎样用好——这也是为担当者担当、为干事者撑腰的重要标尺当代陕西(2019年5期)2019-03-21便携式转辙机转换力测试仪铁道通信信号(2018年10期)2018-12-06一种永磁种子磁化机的设计农业科技与装备(2017年4期)2017-08-17超高商业大厦内部磁场强度的研究与分析科技资讯(2017年3期)2017-03-25S700K转辙机保持力测试方法探讨铁道通信信号(2016年6期)2016-06-01推荐访问:道岔 位移传感器 设计