基于波形回放的失步解列装置动作行为评估方法研究
来源:优秀文章 发布时间:2023-04-17 点击:
俞秋阳,常宝立,王新宝
(南京南瑞继保电气有限公司,江苏 南京 211102)
在多重严重故障冲击下,电力系统可能发生失步振荡,一旦发生失步振荡电网面临全面崩溃风险。为防止电网崩溃需要配置失步解列装置,捕捉失步振荡特征将电网解列为多个子系统,并确保各子系统能够维持各自同步运行[1-4]。
目前大区互联电网的失步解列装置主要采用UCosφ失步判据,在大区互联断面配置多套失步解列装置[5-6]。当系统发生失步振荡时,失步解列装置的动作行为将直接关系到大电网的安全稳定,因此评估电网发生严重故障时失步解列装置的动作行为是十分必要的[7-10],其中包括了对失步判据可靠性和整定定值合理性的评估工作。
目前对失步解列装置动作行为评估方法主要是使用BPA 和PSASP 等电力系统机电暂态仿真程序进行时域仿真,并输出失步判据所需的电压、电流等物理量的有效值曲线,经过二次加工后形成UCosφ曲线进行人工判断,或者使用RTDS 等数模仿真系统接入实际的失步解列装置,进行在环实验[11-15]。
以上两种方法各有优缺点,人工判断方法简单但准确性差,数模仿真方法准确性高但实施复杂。本文研究基于波形回放技术的失步解列装置动作行为评估方法,为相关工作提供一种简单可靠的技术手段。
电力系统发生多重严重故障时的动态响应行为通常使用机电暂态时域仿真程序进行模拟。失步振荡过程是典型的机电暂态过程,因此目前业界通常借助BPA或PSASP等仿真工具进行失步振荡的分析研究。
UCosφ失步判据在我国电网中应用广泛。电网发生失步后解列点的设置位置是否合理,UCosφ失步判据能否在装置安装处准确捕捉到失步振荡特征,失步解列的定值设置是否能够保证失步解列装置正确动作,都需要采用测量点的三相电流、电压瞬时值作为输入量,并结合UCosφ失步判据算法逻辑以及失步解列装置定值进行评估。本文设计的评估方法如图1所示。

图1 评估方法设计方案Fig.1 Design scheme of evaluation method
其中BPA 和PSASP 的计算结果文件作为波形数据源。机电暂态时域仿真程序BPA 和PSASP 的计算结果文件中输出的是三相电压、三相电流的有效值,而模拟真实失步解列装置的动作行为需要使用瞬时值作为输入。因此为了满足波形回放的前提条件需要从机电暂态时域仿真程序BPA 和PSASP 的计算结果文件中提取出测量点三相电压、三相电流有效值数据并将其转化为三相瞬时值数据。
本文研究的评估方法并不需要接入真实的失步解列装置,而是利用软件模拟的UCosφ失步解列虚拟装置来实现动作行为评估。虚拟装置主要实现UCosφ失步判别算法,包括失步振荡周期的判别算法和失步振荡中心的区域判别算法。
UCosφ失步解列虚拟装置根据回放的测量点三相电压、电流瞬时值波形,利用UCosφ失步判别原理进行分析,并结合失步解列整定值得出失步判别结果和是否需要解列的动作指令。
本文提出的设计方案虽然目前仅实现了UCosφ失步判据,但其架构具备可扩展性。目前我国电网中除采用UCosφ失步判据以外,还经常使用循序阻抗失步判据和相位角失步判据[16-17]。只需在本方案的虚拟装置模块中对这两种判据进行算法模拟,即可通过波形回放方法对采用这两种判据的失步解列装置的动作行为进行评估。以此类推,其他原理的失步解列装置均可以采用本方案实现动作行为的评估。
用于模拟失步解列装置失步判别算法和解列控制逻辑的软件模块必须与失步解列装置中的嵌入式程序所使用的失步判据与解列控制逻辑一致性,才能真实准确地反映失步解列装置的动作行为。相关工作主要体现在以下3方面。
2.1 UCosφ失步判别方法
以图2两机系统为例,采用下列假设条件:1)两侧等值电势EM和EN幅值相等;

图2 两机等值系统Fig.2 Equivalent two-machine power system
2)系统等值阻抗角为90°;
3)从EM到EN阻抗均匀分布。
如图3所示失步过程中振荡中心的电压Uc与解列装置安装处的电压U以及电压和电流的夹角φ之间存在确定的函数关系:Uc=UCosφ,因此可以利用UCosφ的变化来近似地反映振荡中心电压的变化[18-20]。
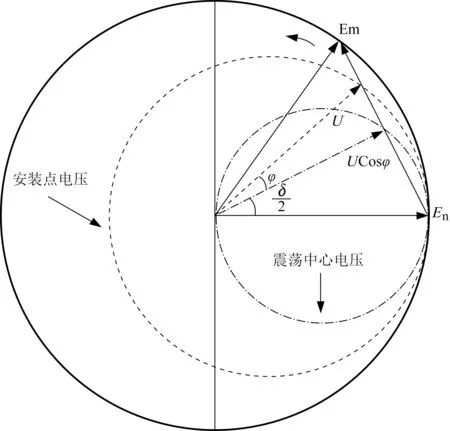
图3 振荡过程安装点及振荡中心电压变化轨迹图Fig.3 Voltage change track of installation point and oscillation center during oscillation
以母线指向线路为正方向,在正常运行期间,当装置安装处电流方向为正时,UCosφ的数值近似等于1,反之则为-1。失步期间振荡中心电压连续变化,并且过零。
2.2 UCosφ失步振荡周期判别模拟方法
电网发生失步振荡时失步振荡中心电压可以用UCosφ的计算值来近似代替。失步振荡过程中UCosφ是连续变化的,并且过零点。在短路故障及故障切除时振荡中心电压则是不连续变化,并且发生突变。在同步振荡时,振荡中心电压是连续变化,但不过零点。因此可以通过UCosφ的变化轨迹来区分失步振荡、短路故障和同步振荡。
图4是使用软件模块模拟UCosφ判据进行失步判别的示意图。在振荡中心电压UCosφ的变化平面上,将UCosφ的变化范围分为7 个区,当振荡中心电压按照0-1-2-3-4-5-6-0 或者0-6-5-4-3-2-1-0 依次穿区变化时,软件模拟的UCosφ失步判据判为系统出现并经历一个失步振荡周期,振荡周期计数器累加一。该判断逻辑和实现方法与实际失步解列装置中保持一致。

图4 振荡过程UCosφ变化轨迹图Fig.4 Curve of UCosφin out-of-step oscillation process
通过对UCosφ轨迹运行特征的跟踪和识别,失步解列装置模拟软件可以完成对失步振荡周期的判别和计数,为解列控制逻辑的模拟提供信息。
2.3 UCosφ失步振荡中心范围确定方法
实际的UCosφ失步解列装置中使用失步振荡过程中的最低电压值来确定装置保护的范围,最低电压值越接近于0表明装置安装处离失步振荡中心越近。通过设置合理的最低电压门槛值来决定是否采取解列措施,可以保证相邻失步解列装置的选择性配合。
如图5 所示,失步判据模拟软件模中使用相同的判断方法,捕捉一个失步振荡周期中测量点的电压最低值,并与实际失步解列装置的低电压定值进行比较,以确定失步振荡中心是否在该装置的保护范围内。如果满足,则UCosφ失步解列装置满足失步振荡中心在保护范围内的判别条件。

图5 保护范围低电压定值Fig.5 Low voltage setting value of protection range
通过上述方法,可以模拟电网中发生预想故障情况下,某处实际安装的UCosφ失步解列装置中失步判据中的保护范围的判别结果。
在模拟UCosφ失步判据的基础上,本文实现了基于波形回放的UCosφ失步解列装置动作行为模拟方法,利用BPA 或PSASP 机电暂态时域仿真程序的仿真输出数据,结合UCosφ失步判据模拟和解列整定定值,模拟实际失步解列装置的动作行为,对失步解列装置的动作情况进行校核和评估。
图6是本文实现的失步解列装置动作行为模拟方法逻辑框图。当根据UCosφ失步判据识别出一个失步振荡周期后,判据模拟模块中的失步周期计数器累加1,当计数值大于等于失步解列装置周期整定值时,若最近一个失步振荡周期内的最低电压低于失步解列装置的低电压定值,则判定失步解列装置动作于解列,反之则不动作。

图6 模拟方法逻辑框图Fig.6 Logic block diagram of simulation method
无论UCosφ失步解列装置动作还是不动作,在波形回放结束后,均输出整个回放过程中UCosφ失步判据算法和解列控制逻辑的判断中间过程,包括UCosφ轨迹的穿区记录、失步振荡周期计数器的变化过程、测量点在各个失步振荡周期内的最低电压记录信息等。
结合以上中间过程记录和最终动作结果,可以评估实际UCosφ失步解列装置的布点方案的合理性,定值整定的适应性,以及最终动作结果的正确性。其主要判断的依据是根据波形回放后虚拟装置动作结果,判断当前布点的各个失步解列装置是否能够将失步断面完整和快速地同时解开,使电网分裂为几个各种保持同步运行的子系统。
UCosφ失步解列装置在我国大区互联电网中应用较为广泛。本文提出并实现了一种基于波形回放的UCosφ失步解列装置动作行为模拟方法,能够利用BPA 或PSASP 机电暂态时域仿真程序的仿真输出数据,进行波形回放,并模拟实际失步解列装置的失步判别过程和解列动作行为。本文所设计的方案具有通用性和创新性,可适用于不同失步判别原理的解列装置动作行为的模拟和评估,为失步解列装置的布点研究、定值整定、动作效果评估等工作提供了一种合理可行的实用方法,具有良好的应用前景。
猜你喜欢暂态定值波形圆锥曲线的一类定值应用中学生数理化(高中版.高二数学)(2022年1期)2022-04-26“大处着眼、小处着手”解决圆锥曲线中的定值问题新世纪智能(教师)(2021年2期)2021-11-05300Mvar空冷隐极同步调相机暂态特性仿真分析大电机技术(2021年5期)2021-11-04对《压力容器波形膨胀节》2018版新标准的理解及分析中国特种设备安全(2021年9期)2021-03-02基于LFM波形的灵巧干扰效能分析测控技术(2018年2期)2018-12-09电力系统全网一体化暂态仿真接口技术电子制作(2018年14期)2018-08-2110kV线路保护定值修改后存在安全隐患电子制作(2018年10期)2018-08-0410kV线路保护定值修改后存在安全隐患电子制作(2018年12期)2018-08-01基于ARM的任意波形电源设计通信电源技术(2016年3期)2016-03-26双丝双正弦电流脉冲波形控制焊接(2016年5期)2016-02-27推荐访问:波形 回放 装置