基于深度学习的海冰融池识别
来源:优秀文章 发布时间:2023-04-10 点击:
王智豪,柯长青
(南京大学 地理与海洋科学学院,南京 210023)
融池是海冰表面积雪融化后聚集形成的水池。6—7月融池可覆盖10%~50%的北极海冰表面,导致表面反照率下降,进而导致冰和水面吸收额外热量,影响反照率反馈强度[1]。气候模型模拟发现,融池对海冰质量平衡、海洋混合层热收支和盐量收支等具有重大影响[2-4]。融池识别对于准确预测海冰融化量至关重要[5]。
在早期研究中,主要利用辐射计对冰的表面反照率进行测量[6]。Yackel等[7]在2000年基于非监督分类对航空像片进行融池识别。Maekus等[8]和Howell等[9]采用Landsat 7、QuikSCAT等卫星数据对融池进行估计。2008年,Tschudi等[10]首次提出基于MODIS影像的融池比率(melt pond fraction,MPF)估算的混合像元算法,但该算法对初始数据中的误差敏感。张干等[11]根据融池物理特征,改进MODIS影像的MPF算法。Rösel等[12]扩展了Tschudi算法,但不同成分的先验固定光谱反射系数仍可能导致MPF反演精度不高。2015年,Zege等[13]基于MERIS和牛顿-拉夫森方法的迭代程序,根据海冰和融池物理特征,利用光学卫星数据反演MPF;
Yackel等[14]用多端元光谱混合分析方法估算MPF。阈值法、主成分分析法(principal component analysis,PCA)等多种分类和统计检测方法运用到MODIS、MERIS和VIIRS等光学卫星图像,用于反演MPF,但均效果不佳。主要原因是北极融池以小型融池为主(小于200 m2)[15],小于传感器的空间分辨率[16]。
近年来,深度学习已广泛应用于地物的遥感图像分类处理。Lee等[17]基于MODIS和WorldView影像,利用MNN和多项回归逻辑算法(multinomial logistic regression,MLR)对融池进行分类并反演MPF。但MODIS与WorldView分辨率的差异,影响融池识别精度。
选择高空间分辨率光学影像可提高融池识别精度。航空影像虽分辨率高,但短期内无法覆盖整个北极地区。Scharien等[18]发现Sentinel-1后向散射系数与MPF具有高相关性,但未能实现融池识别。Sentinel-2影像具有高时空分辨率的优势,满足融池识别要求,可在影像上直接观察到融池。本文基于10 m分辨率的Sentinel-2B影像,选择融池、海冰和开阔水域反射率区分度大的可见光(波段2、3、4)和近红外(波段8)波段作为特征波段。人工目视解译选取训练样本,以波段2/3/4反射率、波段2/3/4反射率与波段2/3/4/8反射率差值归一化值,两种特征组合方式,分别进行MNN训练。根据其分类结果,选出识别效果最佳的MNN,并与已有算法比较,验证方法的可靠性。
1.1 研究区
波弗特海位于美国阿拉斯加州北部,及加拿大西北部沿岸以北至班克斯岛之间,一年冰和多年冰覆盖范围广。6—8月海冰表面出现大量融池,通过光学遥感影像极易发现。因此,选取位于80.02°N~82.85°N,115.14°W~141°W覆盖波弗特海的6—8月的Sentinel-2B影像(图1)。

注:覆盖区域a、b、c、d的影像获取日期分别为2020年7月8日、6月30日、7月22日、8月7日。
1.2 数据
Sentinel-2A、2B分别由欧洲航天局于2015年6月23日和2017年3月7日发射升空。Sentinel-2携带多光谱成像仪(multispectral imager,MSI),具有不同的空间分辨率,分别为10 m、20 m、60 m。选取2020年6月30日、7月8日、22日和8月7日的Sentinel-2B L1C级数据,云覆盖率分别为4.2%、2.02%、4.27%和4.18%。其中,6月30日、7月8日、7月22日影像用作样本采集,8月7日影像用作精度验证。数据来源于欧洲航天局(https://scihub.copernicus.eu/)。
识别流程包括影像预处理、样本点选取、MNN搭建和模型测试等(图2)。因不同阶段融池、海冰和开阔水域在影像上呈现不同特征,可人工目视解译生成样本集。基于两种特征组合生成两个实验样本集,分别进行MNN训练,其中70%是训练集,30%是测试集。

图2 Sentinel-2影像MNN融池识别方法
2.1 样本点选取
基于融池、海冰和开阔水域在光学影像上呈现不同的颜色,人工目视选取样本点。不同阶段融池呈现不同颜色,参见图3,(选自2020年6月30日影像)。融池颜色由其下层海冰厚度或融池水深决定[19]。海冰较厚或融池较浅为鲜艳的蓝色,海冰较薄或融池较深为蓝绿色,海冰只有薄薄的一层时为灰色。颜色不同意味着不同阶段的融池在光谱特征中存在差异。为保证样本集具有较好的适用性,在选取样本点时,对不同颜色的融池进行区分。将蓝色和蓝绿色的融池归为亮融池,灰色的融池归为暗融池。6月30日、7月8日、7月22日影像的样本点总数约为1∶1∶1,每幅影像上开阔水域、海冰、亮融池和暗融池的样本约按1∶1∶1∶1选取,样本总数共计18 895个。

图3 Sentinel-2影像上不同颜色的融池
2.2 地物光谱特征分析
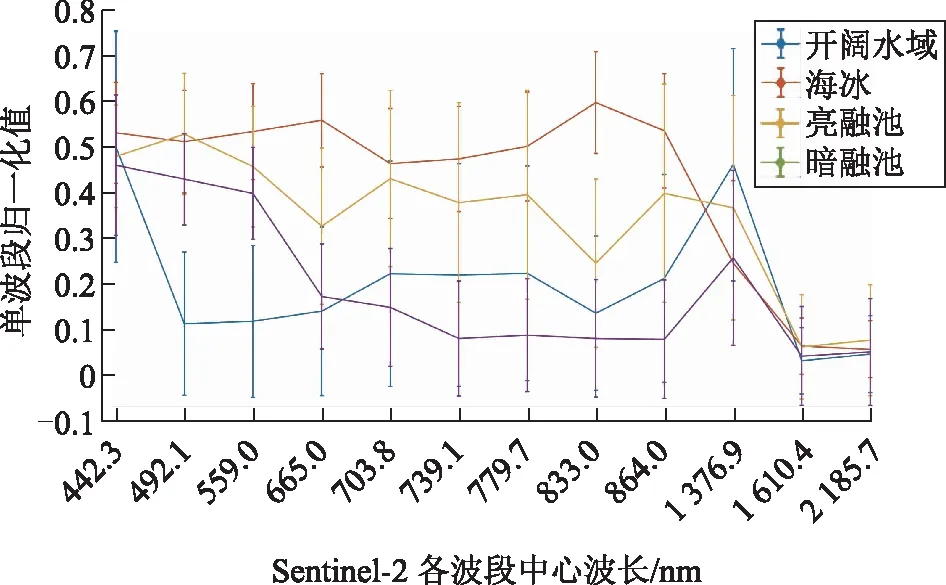
基于样本点数据,进行地物光谱特征分析(图4)。通过分析发现,在相近区域内不同时段的各类地物反射率曲线在一定误差范围内波动,各种因素(如海冰厚度、海冰密集度等)造成的误差不会改变曲线的整体波动趋势,保证了样本集的适用性。

注:标号“2”为蓝光波段,标号“3”为绿光波段,标号“4”为红光波段,标号“8”为近红外波段,误差棒表示为平均值±标准差。
在可见光波段,融池、海冰和开阔水域的反射率具有显著区分度。但在近红外波段,暗融池与开阔水域的反射率几乎相同。这是由于水体在可见光范围内,反射率总体较低,在近红外波段,反射率值接近0。融池本质为水池,具有水体的一切性质[20],其反射率取决于深度、下层冰的物理性质以及融池水体中生物或颗粒物质的数量。底层冰的散射对400~600 nm的反射率影响最大。在可见光范围内,亮融池反射率比暗融池大2至2.5倍。随着融池越来越宽、越深,下层冰变薄,减少了冰的散射影响,融池光谱特性越近似于水体。这导致在近红外波段,暗融池反射率与开阔水域相同,而亮融池反射率与开阔水域有区别。反观海冰,在可见光和近红外波段始终具有高反射特性,与其他两类地物具有显著差异。因此可基于可见光波段反射率进行融池识别。
2.3 波段差值归一化处理
文献[19]发现海冰反射率依赖于传感器和太阳天顶角以及方位角,海冰和融池的各向异性反射特性降低融池识别精度。选择Sentinel-2B 4个10 m空间分辨率且地物反射率差异性大的波段(波段2、波段3、波段4、波段8),分别进行差值归一化处理(式(1)),使其影响最小化。

(1)
在图5、图6中,除波段2与波段3 组合外,其余组合的归一化值均具有明显差异性,可用于融池识别。观察图5、图6可知,对仅使用可见光波段(图5、图6中波段23、波段24、波段34组合)而言,结合近红外波段(图5、图6中蓝色高亮区的波段28、波段38、波段48组合)可增强地物间的区分性。

注:方框中平行的红线表示中值,而上线表示样本的75%,方框中的下一行表示样本的25%。
此外,相较于图4中暗融池与开阔水域的差异性而言,差值归一化处理(图6),增大了二者的区分度。结合使用可见光波段反射率与差值归一化值,进行MNN融池识别,可弥补暗融池与开阔水域可见光反射率区分度的不足,提高其他地物的识别度。

注:标号“2”为蓝光波段,标号“3”为绿光波段,标号“4”为红光波段,标号“8”为近红外波段,误差棒表示为平均值±标准差。
2.4 多层神经网络
融池识别需遍历整幅影像像元。与人工数据处理方式相比,深度学习提高处理速度。典型MNN结构包括输入层、隐藏层和输出层。基于Tensorflow模块,进行MNN搭建。通过测试发现,单层隐藏层的MNN识别效果不佳,需对隐藏层层数及每层中的神经元个数进行调整。并且不同的激活函数与优化器会对识别精度造成影响。以可见光波段反射率作为输入数据为例,搭建如图7的MNN。输入层3个节点分别输入可见光3个波段的反射率。通过设置不同的隐藏层层数、每层神经元数,选择验证精度最高的参数,即3层隐藏层,每层神经元个数分别为15、20、15。前反馈激活函数采用relu和sigmoid,优化器选择adam,损失函数使用sparse categorical crossentropy,迭代次数为100。样本集的70%作为训练集,30%作为验证集。输出层为开阔水域、海冰、亮融池和暗融池。基于可见光波段与归一化值的MNN结构与图7相比,仅将输入层神经元个数调整为9个。

图7 基于Sentinel-2可见光波段反射率为输入数据的MNN结构
3.1 融池识别结果
图8(e)~图8(h)可观察到融池的不同状态。两种MNN均能识别出不同状态的融池以及海冰和开阔水域。图8表明,两种MNN具有不同的识别结果。结合表1可发现,相较于基于可见光波段反射率,基于可见光波段与归一化值MNN,亮融池与暗融池识别比例更大。由表1可知,6—8月融池的覆盖率变化较大。6月30日亮融池与暗融池的覆盖率约为1∶1。随着融池演变,其下层冰变薄,颜色变深,因此7月8日暗融池覆盖率远高于亮融池。融池的排水机制使表面融水排入开阔水域,导致融池消失。当融池融透时,已不具备融池的特性,其应归为海水。并且7月底北极气温开始下降且夜间温度低,融池表面开始结冰,逐渐失去融池的特性。因此7月22日和8月7日结果相较于前两日结果,融池覆盖率大幅下降,此时融池主要为暗融池。

表1 基于MNN分类的各地物覆盖率 %

注:子图(a)~子图(d)为Sentinel-2原始影像;
子图(e)~子图(h)分别为子图(a)~子图(d)中红框内影像;
子图(j)~子图(l)为可见光波段反射率MNN分类结果;
子图(m)~子图(p)为可见光波段与归一化值MNN分类结果。
3.2 精度验证
基于2020年8月7日影像中随机一块区域(图8(h)),生成1 000个兴趣点(point of interest,POI),并人工目视解译确定标签(开阔水域、海冰、亮融池和暗融池)。将两种MNN分类结果与标签对比,通过混淆矩阵进行精度评价(表2、表3)。结果表明,基于可见光波段与归一化值分类总体效果(表2),优于基于可见光波段反射率(表3)。这表明波段差值归一化处理可提高融池识别精度。
8月7日,一些融池表面出现薄冰。当薄冰较薄时可忽略其影响;
当薄冰厚度到达界定值时,此时的融池应归为海冰。仅依赖Sentinel-2影像无法准确确定薄冰层厚度具体的界定值,可能影响融池和开阔水域的生产者精度。
人工目视解译中亮融池与暗融池的判别受主观判断影响,使部分亮融池误判为暗融池,导致暗融池的生产者精度欠佳,但并不影响融池类的识别精度。因此,基于可见光波段与归一化值的MNN仍具有较好的融池识别精度。
由于暗融池和开阔水域在可见光波段区分度低,导致基于可见光波段反射率MNN暗融池分类结果欠佳。而在图5中,暗融池与开阔水域差异显著,MNN更易准确识别暗融池,其用户精度从59.0%(表3)提升至96.1%(表2)。

表2 2020年8月7日Sentinel-2影像可见光波段与归一化值分类混淆矩阵(总体精度:88.0%)

表3 2020年8月7日Sentinel-2影像可见光波段反射率分类混淆矩阵(总体精度:82.9%)
4.1 与基于单波段归一化方法对比
与使用可见光波段相比,归一化处理可提高MNN分类精度。为比较单波段归一化(式(2))和差值归一化对地物识别精度影响的差异,以2020年7月8日影像(图10(a))为例,将可见光波段反射率与单波段归一化值输入MNN进行分类。将基于可见光与单波段归一化值MNN融池识别结果,与上文两种识别结果对比。

(2)
结果表明,基于可见光与单波段归一化MNN(图10(b))分类错误,低估海冰比例,高估融池类比例。对比图4、图9发现,单波段归一化处理降低海冰、亮融池和暗融池的区分度,而波段差值归一化处理能放大各类地物的差异特征,更有利于融池识别。
注:误差棒表示为平均值±标准差。

图10 3种MNN融池识别结果
4.2 与PCA方法和LinearPolar方法对比
Rösel等[21]利用Landsat波段1和波段4反射率实现基于PCA区分融池与非融池的算法。Wang等[22]改进了Rösel的算法,基于Sentinel-2的波段2和波段8反射率提出LinearPolar算法。为对比两种算法和MNN的差异,分别对同一区域进行识别(图11)。Landsat波段1和波段4,对应于Sentinel-2波段2和波段8。基于Sentinel-2的PCA算法(表4)能较好区分融池类与非融池类,但未能较好区分亮融池与暗融池,且算法高估暗融池的比例。与之相比,LinearPolar算法(表5)提高了暗融池的识别精度,但低估了亮融池比例。
上两种算法仅识别亮融池与暗融池,均未区分开阔水域与海冰。阈值选择的合理性直接影响识别结果的准确性,且参数与阈值具有局限性不适用于大规模影像处理。

表4 2020年6月30日Sentinel-2影像PCA算法分类混淆矩阵(总体精度:89.1%)

表5 2020年6月30日Sentinel-2影像LinearPolar算法分类混淆矩阵(总体精度:89.9%)

图11 基于可见光波段与归一化值的MNN、PCA、LinearPolar算法融池识别结果
MNN通过差值归一化处理,降低融池的各向异性反射特性等多种因素对识别的影响,提高亮融池和暗融池的识别精度(表6)。可实现开阔水域、海冰、亮融池与暗融池的分类。同时MNN无需人工选择阈值,提高了影像处理速度,可运用于大规模影像处理。

表6 2020年6月30日Sentinel-2影像可见光波段与归一化值分三类混淆矩阵(总体精度:97.1%)
4.3 与随机森林(random forest,RF)和支持向量机(support vector machine,SVM)对比
Hyangsum等[23]基于RF识别融池,Qin等[24]基于SVM识别融池。利用同一区域分别进行MNN、机器学习处理,对比3种方法融池识别的差异。根据图12(c)和表7可得,RF整体识别效果尚可,总体精度达到94.2%。但暗融池识别效果不佳。RF将大量海冰边缘区误判为暗融池。由图12(d)可知,SVM能较准确识别海冰边缘区,但高估暗融池低估亮融池。亮融池的生产者精度从82.8%(表7)降至65.3%(表8),暗融池的用户精度从31.9%(表7)降至16.3%(表8),导致SVM的总体精度仅有90.5%。
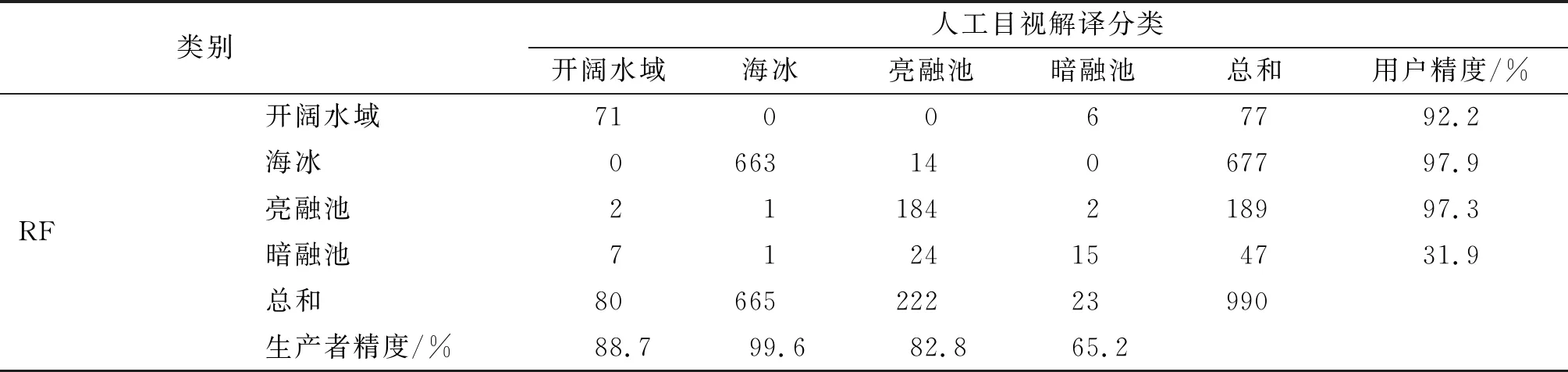
表7 2020年6月30日Sentinel-2影像RF分类混淆矩阵(总体精度:94.2%)

表8 2020年6月30日Sentinel-2影像SVM分类混淆矩阵(总体精度:90.5%)

图12 基于可见光波段与归一化值的MNN、RF、SVM融池识别结果
基于可见光波段与归一化值 MNN(表9),不仅避免高估暗融池低估亮融池的问题,还可准确识别海冰边缘区。总体识别精度达到97.0%,亮融池和暗融池的用户精度和生产者精度分别提升至98.9%、87.8%和61.1%、95.6%。

表9 2020年6月30日Sentinel-2影像可见光波段与归一化值分四类混淆矩阵(总体精度:97.1%)
人工目视解译选取夏季波弗特海的亮融池、暗融池、海冰及开阔水域的训练样本点,分别使用可见光波段反射率、可见光波段反射率结合差值归一化值,作为MNN输入进行影像分类。
根据与POI标签对比,对两种MNN分类结果进行精度评估。结果表明,基于可见光波段与归一化值MNN能更准确识别融池。与单波段归一化处理方式相比,差值归一化处理增大暗融池与开阔水域的特征差异,提高分类精度。相较于PCA算法、LinearPolar算法、RF和SVM,基于可见光波段与归一化值MNN可实现开阔水域、海冰、亮融池和暗融池的准确分类,提高亮融池与暗融池的识别精度,使亮融池与暗融池的用户精度分别提高至98.9%和61.1%。因此,基于可见光波段与归一化值MNN融池识别更具准确性和可靠性。
未来可提高生成样本集速度,尝试基于图像的卷积神经网络分类,实现对影像的精细化分类。
猜你喜欢 海冰反射率水域 近岸水体异源遥感反射率产品的融合方法研究海洋通报(2022年4期)2022-10-10具有颜色恒常性的光谱反射率重建光谱学与光谱分析(2022年4期)2022-04-06提升水域救援装备应用效能的思考水上消防(2021年3期)2021-08-21末次盛冰期以来巴伦支海-喀拉海古海洋环境及海冰研究进展海洋通报(2021年3期)2021-08-14近三十年以来热带大西洋增温对南极西部冬季海冰变化的影响成都信息工程大学学报(2021年2期)2021-07-22进博会水域环境保障研究及展望水上消防(2020年5期)2020-12-14柳江水域疍民的历史往事文史春秋(2019年11期)2020-01-15基于地面边缘反射率网格地图的自动驾驶车辆定位技术汽车文摘(2018年2期)2018-11-27城市水域生态景观设计探讨智能城市(2018年7期)2018-07-10基于SIFT-SVM的北冰洋海冰识别研究电子技术与软件工程(2016年24期)2017-02-23推荐访问:深度 识别 学习