桥梁GNSS-RTK变形监测数据的多滤波联合去噪处理
来源:优秀文章 发布时间:2023-01-15 点击:
熊春宝,王 猛,于丽娜
(天津大学建筑工程学院,天津 300072)
对桥梁实施动态变形监测是保证桥梁正常运营的必要手段。变形监测的方法主要有传统测量方法和全球导航卫星系统[1](global navigation satellite system,GNSS)。在实际外部环境激励下,采用全球导航卫星系统的实时动态(real time kinematic,RTK)差分对桥梁监测的数据受到各种因素的影响,致使接收的信号响应真实性存在一定误差,主要受多路径效应和随机噪声的影响[2-3],因此有必要对桥梁的监测信号数据进行降噪处理以获取桥梁的真实动态位移。为了尽可能消除监测数据中的不利影响,不少学者进行了很多研究,常用的降噪方法主要有EMD(empirical mode decomposition)[4]、EEMD(ensemble empirical mode decomposition)[5-6]和改进的EEMD(complete ensemble empirical mode decomposition,CEEMD)[7]。例如:文献[8]使用EMD实现了激励条件下桥梁信号的分解;
文献[9]基于EMD算法对苏通大桥实施GPS监测并提取到了桥梁的变形信息;
文献[10]对GPS与加速度计联合监测到的数据进行处理,采取EMD降噪提高了桥梁的监测精度;
文献[11]利用小波变换与EMD相结合的方法,对大桥GNSS监测信号进行降噪以提取其振动信息;
文献[12]运用EEMD降噪成功获得了桥梁的挠度信号。然而EMD分解得到的本征模态函数(IMF)会发生严重的模态混叠现象和端点效应。EEMD虽然在一定程度上削弱了模态混叠,但对于端点效应不能很好地改善。CEEMD通过添加正负白噪声对EEMD进行改进,但其本质与EEMD相同,无法避免因加入不同噪声信号而产生的附加模态问题[13]。对于自适应噪声的完备集合经验模态分解(complete ensemble empirical mode decomposi-tion with adaptive noise,CEEMDAN)[14]能有效解决模态混叠问题且具有较小的重构误差。
鉴于上述情况,本文提出Chebyshev滤波[15]、CEEMDAN及小波阈值(wavelet threshold,WT)[16]的多滤波联合降噪的方法,采用GNSS-RTK技术对天津海河大桥进行动态变形监测,对监测数据按本文提出的方法进行降噪处理,并与EMD、EEMD和单一的CEEMD方法进行对比。通过对比分析,验证所提方法的优越性,并获取桥梁的真实动态位移。
1.1 监测对象
本次试验地点选在天津海河大桥,该大桥由两座主桥组成,两座主桥均为独塔双索、钢混结构主梁的斜拉桥。两座主桥建设于不同时间,其中旧主桥跨度为310 m+46 m+3×48 m;
新主桥的跨度为310 m+2×40 m+2×50 m。桥面宽度为23 m,主塔高为167.3 m,呈反对称布置,两座主桥均为4车道,结构简图如图1所示。由于海河大桥整体跨度大,桥面距离地面位置较高,来往车流量密度较大,且多为大型货车,因此风荷载和车辆荷载严重威胁桥梁的健康状况。

图1 海河大桥结构简图
1.2 试验信号数据处理流程
如图2所示,试验过程主要有分为两部分:①利用GNSS-RTK技术对天津海河大桥进行变形监测试验,获取桥梁变形监测信号,然后进行Chebyshev滤波处理,消除多路径偏差。②进行CEEMDAN分解,得到若干个IMF分量和1个残余分量,并求解各个IMF分量的自相关归一化函数,识别出带有随机噪声的IMF分量,并进行WT降噪去除随机噪声,最后对信号进行重组以获取桥梁真实动态位移。同时分别用EMD、EEMD和CEEMD方法进行对比,从而说明所提方法的优越性。

图2 试验信号处理流程
本次试验时间为2019年3月27日,监测点设在新建海河大桥的主跨部分,如图1所示。试验采用设备为某公司的海星达H32接收机,还有两套GNSS-RTK系统、两台笔记本电脑、一台发电机等相关设备。RTK在水平方向标记的定位精度为±10 mm,高程方向的定位精度为±20 mm,试验前对RTK稳定性进行了试验,试验结果证明RTK稳定性较好。如图3所示,监测点上有两台GNSS-RTK接收机作为流动站,以便可以互相验证。基准站架设在距离大桥500 m左右的空旷空地上,对大桥进行连续3.5 h的监测。选取X方向的部分监测数据作为原始信号响应,如图4(a)所示,从图4(a)可以看出原始位移在外部激励的作用下,位移值在-25.8~21.51 mm之间变化,波动较大,信号被噪声所影响。
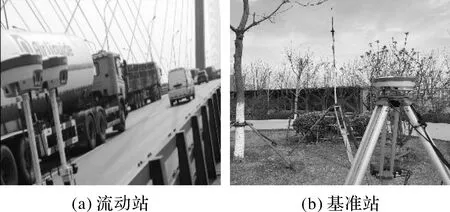
图3 流动站和基准站
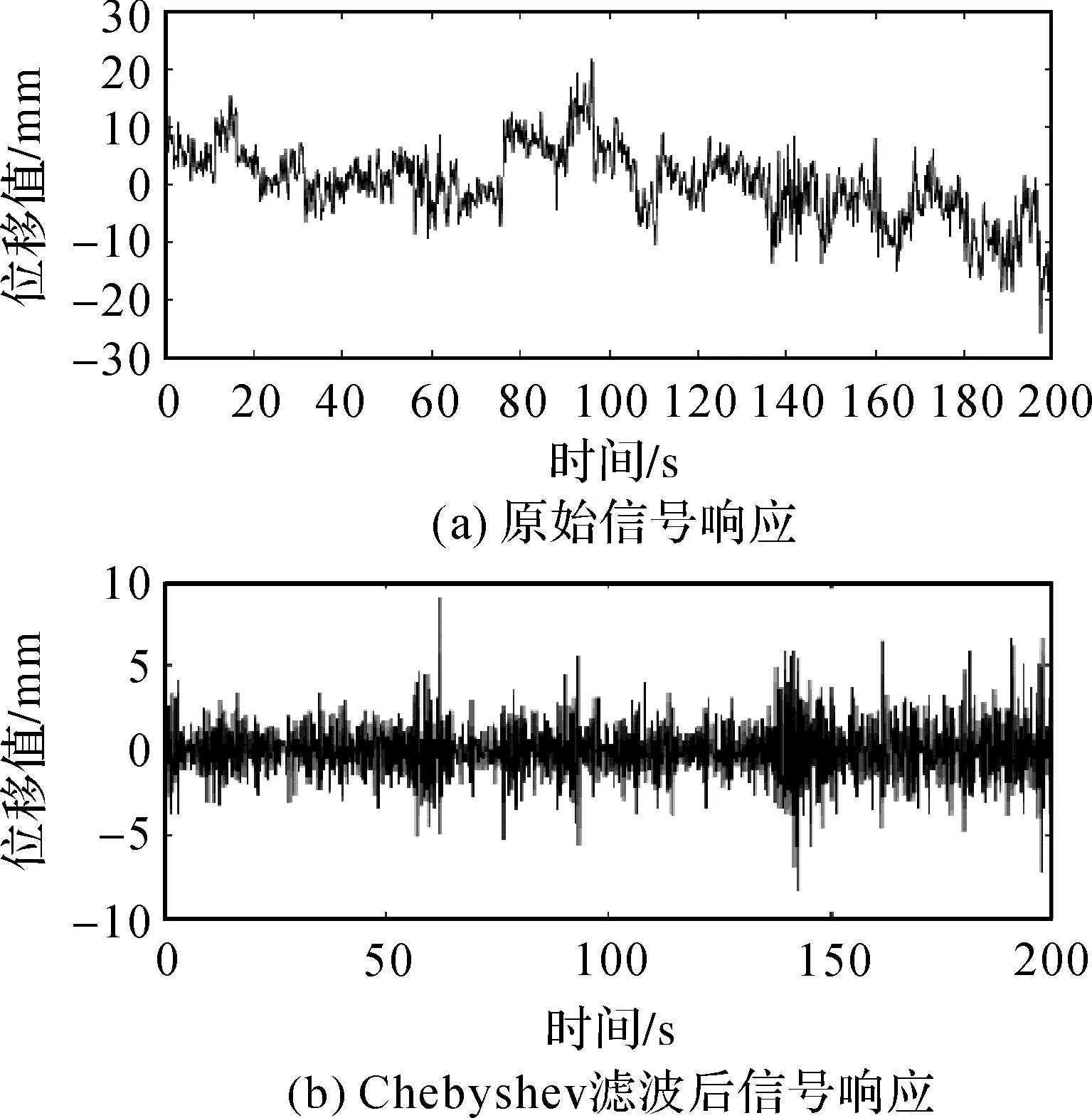
图4 原始位移和滤波后位移
首先对GNSS-RTK获取的桥梁监测信号进行Chebyshev滤波降噪。由文献[17]可知,0~0.2 Hz范围内主要分布着桥梁GNSS-RTK监测的低频噪声,而且主要为多路径偏差。根据大桥有限元的自振频率,设置通带截止频率ΩP=0.2 Hz。滤波后的信号响应如图4(b)所示,可以看出,滤波后的信号响应位移值变化幅度明显减小,多路径效应被除掉。
然后进行CEEMDAN分解,得到10个IMF分量和1个残余分量,如图5所示。本文利用随机噪声和一般信号的自相关特性来识别噪声信号和有效信号的IMF分量的界限。
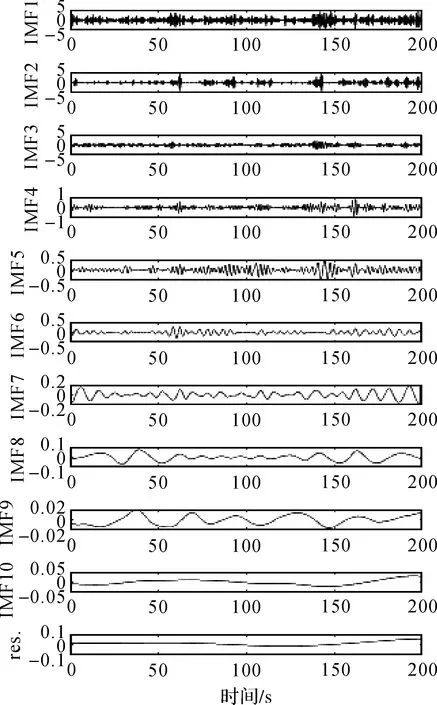
图5 CEEMDAN分解
如图6所示,不同类型信号的归一化自相关函数的特性有所不同,对于噪声信号,在零点处波形幅值最大,其他点处的波形幅值在零附近振荡。而对一般信号,波形幅值零点处也取得峰值,但在其他位置处随时间上下波动,具有一定的相关性。基于不同类型信号的自相关函数特征存在差异性,将CEEMDAN分解中的10个IMF分量进行自相关求解,求解结果如图7所示。从图7可以看出,噪声主要存在于前6个IMF信号分量,因此,对这6个IMF分量选择用WT去噪,去除随机噪声。最后将降噪后的IMF分量与未用WT降噪的IMF分量及残余分量进行重组,得到最终降噪后的桥梁位移信号响应,如图8(a)所示。

图6 不同信号自相关归一化函数
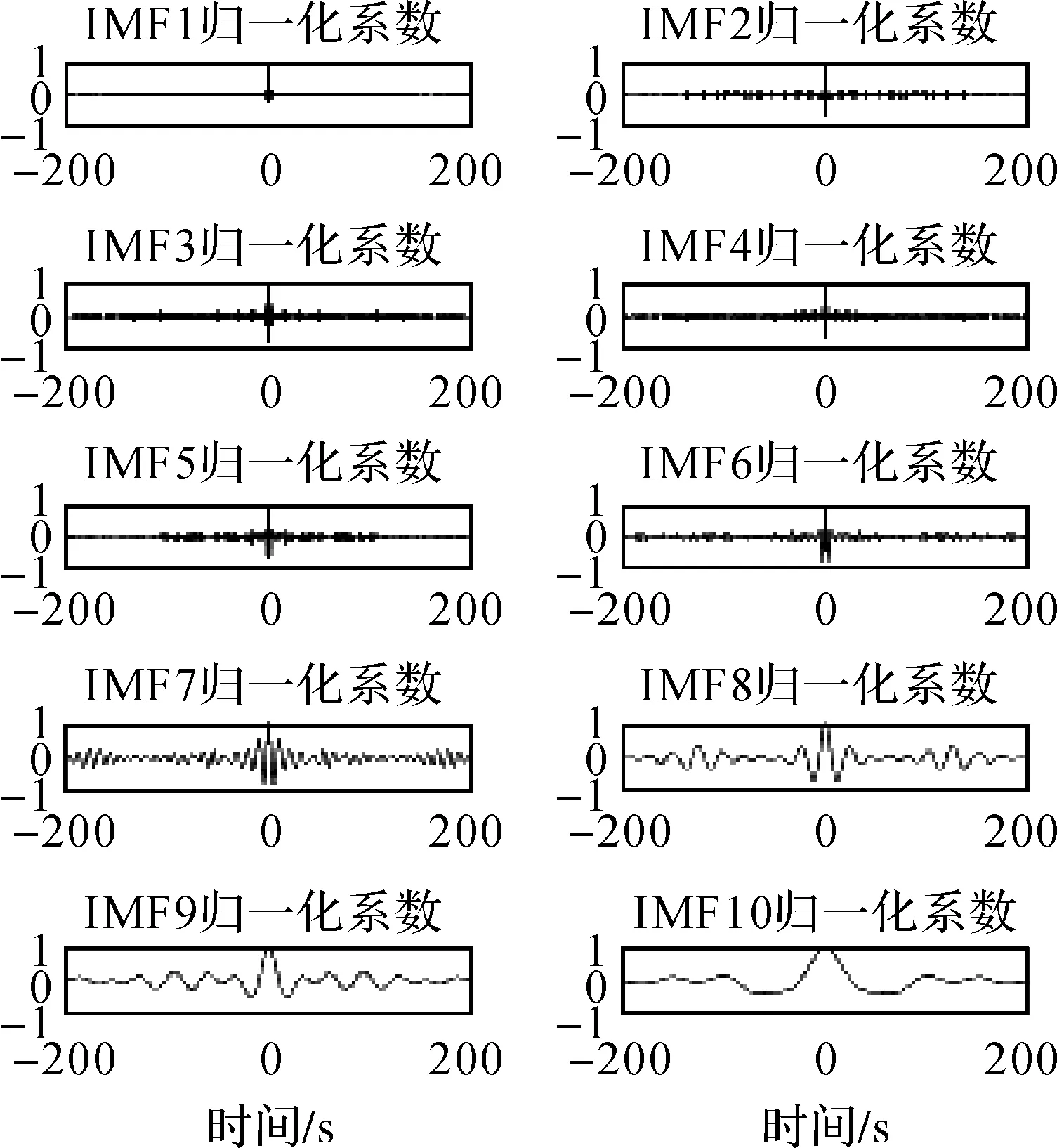
图7 各IMF自相关函数
从图8(a)可以看出,降噪后的桥梁位移振幅的变化范围为-2.518~2 mm,波动幅度进一步减小,随机噪声被滤掉,从而得到桥梁的真实动态位移。从图8(b)频谱分析,可以得到桥梁主要频率为0.53、0.67、1.27 Hz,与有限元结果相吻合。同时计算EMD、EEMD、CEEMD及本文方法的信噪比(SNR)和均方根差(RMSE),计算结果见表1。SNR值越大,RMSE值越小,说明降噪效果越佳,降噪后的信号与原始信号重组精度越高。通过表1可见,EMD分解的SNR值最小,为15.645 dB,RMSE值最大,为1.046 mm。此外,单一的CEEMD分解相对EEMD降噪效果提高并不明显;
而本文方法的SNR值(24.896 dB)最大,相应的RMSE值(0.361 mm)最小,表明本文方法在提取多路径效应和去除随机噪声方面有良好的效果。

图8 桥梁位移与频谱分析

表1 海河大桥信号不同方法的降噪效果
本文采用GNSS-RTK技术对天津海河大桥的一座主桥进行变形监测,并提出了基于Chebyshev滤波、CEEMDAN及WT降噪的多滤波联合降噪方法,用以消除监测信号中的多路径效应和随机噪声。通过试验,得到如下结论:
(1)对GNSS-RTK获取的桥梁变形监测信号进行Chebyshev滤波处理,可以有效抑制监测数据中除随机噪声以外的多路径效应。
(2)对桥梁GNSS-RTK变形监测数据采用本文提出的多滤波方法进行降噪后,SNR值为24.896 dB,RMSE值为0.361 mm,降噪效果优于EMD、EEMD及CEEMD的降噪效果。
(3)GNSS-RTK与多滤波降噪相结合的方法能够准确识别桥梁动态位移和主要频率,为桥梁变形监测提供了优良的降噪方法。
猜你喜欢 分量滤波大桥 基于HP滤波与ARIMA-GARCH模型的柱塞泵泄漏量预测农业工程学报(2022年10期)2022-08-22基于改进自适应中值滤波的图像降噪方法*舰船电子工程(2022年6期)2022-08-02画里有话读者·校园版(2020年19期)2020-09-16相关论青海湖(2020年6期)2020-09-07一斤生漆的“分量”——“漆农”刘照元的平常生活当代陕西(2019年19期)2019-11-23一物千斤智族GQ(2019年9期)2019-10-28一种考虑GPS信号中断的导航滤波算法北京航空航天大学学报(2019年9期)2019-10-26数鸭子幼儿美术(2019年3期)2019-09-10港珠澳大桥通行全攻略珠江水运(2018年20期)2018-11-13论《哈姆雷特》中良心的分量英美文学研究论丛(2018年1期)2018-08-16推荐访问:滤波 桥梁 变形