仿生机器鱼双侧近壁波动推进的水动力学特性研究
来源:优秀文章 发布时间:2023-01-15 点击:
姚 吉, 谢 鸥, 张 峰
(苏州科技大学 机械工程学院,江苏 苏州 215009)
为了适应复杂的水下环境,鱼类经过上亿年的进化,具备了巧妙的外形特征和惊人的游动能力。
按照推进部位不同,可将鱼类分为身体/尾鳍推进模式(Body and/or caudal fin, BCF)和中央鳍/对鳍推进模式(median and/or paired fin, MPF)[1]。
据估计,85%的鱼类为BCF 推进模式,其具有游动速度快、效率高、快速启动等性能。
受鱼类的启发,研究人员模仿并研发了各种仿生水下机器人,有效的克服了传统螺旋桨推进水下机器人存在的噪声大、效率低、能耗高等缺陷。
由于水下环境的复杂性和水下实验的不确定性,计算流体动力学(CFD)被广泛应用于仿生水下机器人的数值模拟实验研究。
夏丹等采用数值模拟方法对鲹科模式机器鱼的自主游动机理进行研究,结果表明机器鱼自主游动过程中,速度和力呈现明显的非定常变化[2]。胡文蓉等采用CFD 方法对鳞鲀模式的游动过程进行数值模拟,研究了鳞鲀模式游动的水动力学特性与流场特征[3]。
苏玉民等基于CFD 方法建立鱼体-流体耦合的三自由度(3-DoF)自主游动计算模型,对仿生金枪鱼模型从静止开始到稳定巡游的过程进行了模拟[4]。胡瑞南等以鲣鱼为仿生对象,模拟计算了两种尾鳍摆动模式的机器鱼在特定流场下的流场压力及鱼体受力等水动力性能[5]。利用CFD 数值模拟方法,研究人员对不同鱼类的游动机理进行了研究并可视化的获得了鱼类游动过程中周围流场的分布,为仿生水下机器人的开发和应用提供了重要的指导作用。
然而已有的研究工作为了简化计算大都假设鱼体运动在一个理想无边界的水域中,而实际的水下作业往往需要仿生机器鱼靠近作业对象的内外侧壁面完成特定的任务,如水下管道检测、海底地形测绘和水下考古等。
大量的研究表明物体靠近地/壁面运动时,将受到明显的地/壁面效应[6-7]。
然而关于鱼类近地面游动的研究还比较少见[8-9]。尤其当仿生机器鱼游动在作业目标的狭缝中,两侧受到壁面效应的影响,其水动力学特性必将产生变化,有待进一步研究。
本文旨在研究仿鲹科机器鱼双侧近壁波动推进的水力学特性。基于CFD 方法建立仿生机器鱼双侧近壁波动推进的仿真模型,重点讨论了靠壁距离和St 数对仿生机器鱼水动力参数的影响关系,揭示了不同工况下的流场结构分布,为仿生机器鱼在非结构环境下的运动控制提供了指导作用。
1.1 问题描述
本文重点考察仿生机器鱼在狭窄空间内波动推进的水动力学特性,如图1 所示,将流场环境简化为两个近距离平行侧壁面形成的水流通道,鱼体体长方向与侧壁面平行,左右为壁面,前方为流场入口,来流速度为v,后方为流场出口。
鱼体长度为L,鱼体中心线到侧壁面的距离为d。
水流通道的宽度为1.2L。
鱼体按鲹科模式波动,波动方程[10]表示为

其中,x 为体长方向的坐标;
A(x)为横向运动的波幅包络,为了模拟真实鱼类的游动特征其系数取值为a0=0.02,a1=-0.008,a2=0.16;
y(x,t)为t 时刻x 处的横向位移;
k=2π/λ 为体波波数,其中λ 为体波波长;
f 为尾鳍摆动频率。
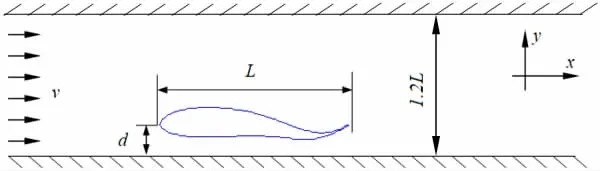
图1 二维物理模型
1.2 数值方法
本文采用二维不可压缩黏性N-S 方程作为流体运动控制方程:

式中,ρ 为流场密度;
u 为流场速度矢量;
p 为流场压强;
μ 为流体动力黏滞系数。
采用有限体积法对控制方程进行离散,基于SIMPLEC 对连续方程中的压力和速度进行耦合求解。
在空间上,采用二阶精度的离散格式对对流项进行离散。
在时间上,采用一阶隐式对物理时间进行离散,使得时间步长相对较大,收敛更稳定。
为了准确模拟鲹科鱼类游动过程中的变形运动,获得鱼体周围的精确流场分布,本文对鱼体周围和近壁面区域进行了网格加密处理,通过编写UDF 脚本,采用弹簧光顺和局部网格重构的动网格技术实现对仿生机器鱼的柔性运动控制。
1.3 参数定义
仿鲹科机器鱼在x 方向(见图1)游动受到的合力为Ft,平均推进力系数CL定义为

式中,ρ 为流体密度;
v 为来流速度;
L 为鱼体长度;
T 为鱼体波动周期;
t 为时间。
y 方向受到的升力为Fl,平均升力系数CL定义为

引入斯特劳哈尔数(St)表征仿生机器鱼的运动特征,定义为

式中,A 为仿生机器鱼的波动摆幅;
f 为仿生机器鱼的波动频率。
在此,设置A 固定为0.2 L,来流速度固定为0.8 L/s, 则St 数直接表征仿生机器鱼的波动频率变化。
为了揭示不同靠壁距离d 和St 数对仿生机器鱼水动力学参数的影响特性,本文开展了一系列的参数化仿真实验(见表1),靠壁距离d=∞表示仿生机器鱼两侧距离壁面无穷远,在仿真实验时采用d=5 L 近似代替,因为当d≥5 L 时壁面效应已基本消失。

表1 实验参数设置(d=∞表示无壁面效应)
2.1 水动力参数分析
图2 为不同靠壁距离d 下的阻力cd 和升力cl 系数时间历程曲线,由图可知,阻力和升力系数曲线均呈周期性波动,升力系数曲线的波动频率与鱼体波动频率一致,而阻力系数曲线的波动频率是鱼体波动频率的2 倍。
无壁面效应(d=∞)时,阻力和升力系数曲线均呈类正弦波动,受壁面效应的影响,鱼体远离壁面摆尾达到最大摆幅时,升力系数曲线的峰值随靠壁距离的减小而增大,而阻力系数曲线的峰值变化很小;
鱼体靠近壁面摆尾达到最大摆幅时,阻力系数曲线的峰值随靠壁距离的减小呈增大趋势变化,而升力系数曲线的峰值基本不变。
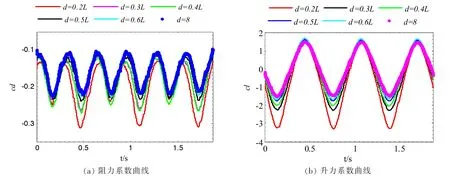
图2 不同靠壁距离d 下的阻力和升力系数曲线
图3 为靠壁距离d 和St 数对平均推力系数和升力系数的影响关系曲面,由图3(a)可知,在给定的靠壁距离范围内,平均推力系数随St 数增大呈类似线性的增长趋势变化。
此外,随着靠壁距离d 的减小,平均推力系数稍有增长且增长幅度随St 数增大而增大。
分析表明仿生机器鱼的波动频率对推进力的影响显著壁,同时壁面效应具有一定的增推作用,此结论与文献[7]一致。由图3(b)可知,平均升力系数在无壁面效应状态下基本保持为0,随着靠壁距离d 的减小,平均升力系数的绝对值呈上升趋势变化且St 数的增大加剧了平均升力系数增大的幅度,在St=0.5,d=0.2 L 时,平均升力系数的绝对值达到最大。
升力增大将导致仿生机器鱼的游动偏航,同时会增加无功功率的输出。
综合考虑靠壁距离d 和St 数对平均推力系数和平均升力系数的影响可知:中等St 数取值下,仿生机器鱼处在偏离双侧壁面中心线一定距离位置波动推进具有最好的水动力特性。
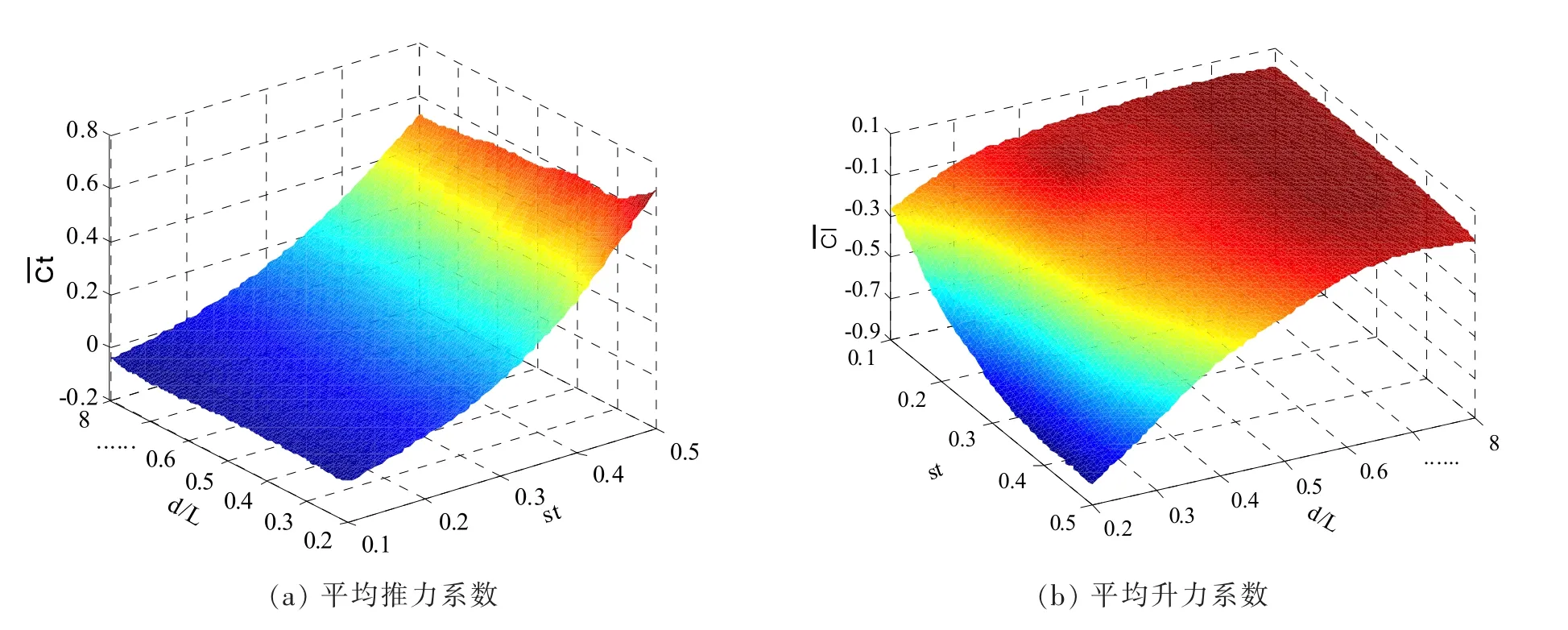
图3 靠壁距离d 和St 数对平均推力系数和平均升力系数的影响关系
2.2 流场结构分布
当St=0.25 时,不同靠壁距离d 下的压力和速度场分布,由图4(a)可知,仿生机器鱼向一侧壁面靠近时,鱼体中部与侧壁之间会形成一个低压区,且低压区随着靠壁距离d 的减小而不断增强。
尾鳍摆动一个周期会在尾迹中形成两个低压中心,当d=0.2 L 时,受壁面的影响一个摆尾周期内形成的两个低压中心会成对的流向尾迹并逐渐远离侧壁面。
随着靠壁距离d 增大,低压中心序列逐渐形成均匀有序的排列且强度逐渐减弱。由图4(b)可知,仿生机器鱼在流场中波动时,鱼体两侧形成高速区,随着靠壁距离d 的减小,靠近壁面侧的高速区强度逐渐增大。尾鳍摆动会在尾迹中形成一个高速带且在高速带的上/下方间隔排列着一系列低速区。
此外,当d=0.2 L 时,尾迹中高速带的强度呈现出高低相间的交错排列,随着靠壁距离d 增大,高速带的强度逐渐均匀化。

图4 不同靠壁距离d 下的压力和速度场分布
如图5 所示,当St=0.25 时不同靠壁距离d 下的涡街分布以及d=0.4 L 时不同St 数下的涡街分布。
由图5(a)可知,仿生机器鱼在一个摆尾周期内会从尾鳍末端脱落两个旋向相反的涡。
当d=0.2 L 时,尾鳍远离壁面摆尾形成的顺时针涡与靠近壁面摆尾形成的逆顺时针涡会相互耦合形成“涡对”向尾迹中流动,且受壁面效应影响,“涡对”在流动过程中逐渐远离侧壁面,涡街中心线与侧壁面形成一定的角度。
随着靠壁距离d 逐渐增大,“涡对”逐渐分离,涡街中心线与侧壁面之间的夹角也逐渐减小。
当d=0.6 L 时,顺时针涡和逆时针涡呈交替等距水平排列。
由图5(b)可知,随着St 数增大,尾涡逐渐变短变圆,涡间距变小。
当St 数增大到一定值后,尾涡在流动过程中出现相互干扰、吸合,形成混合的“涡团”并与靠近的侧壁面相黏合。

图5 不同靠壁距离d 和St 数下的涡街分布
本文采用计算流体动力学方法研究了仿鲹科机器鱼双侧近壁波动推进的水动力学特性,分析了靠壁距离d 和St 数对仿生机器鱼水动力参数的影响关系以及流场分布。得到如下结论:(1)近壁面波动运动具有增推效应同时会增大无功功率输出;
(2)中等的靠壁距离d 和St 数取值具有最好的水动力特性;
(3)壁面效应将引起流场分布的明显变化。
后期将开展水动力实验,对仿生机器鱼双侧近壁波动推进的水动力参数进行测试和验证。
猜你喜欢 侧壁鱼体壁面 二维有限长度柔性壁面上T-S波演化的数值研究北京航空航天大学学报(2022年7期)2022-08-06压力梯度对湍流边界层壁面脉动压力影响的数值模拟分析舰船科学技术(2022年11期)2022-07-15微小型光开关侧壁反射镜光路传输效率优化方法制导与引信(2022年1期)2022-06-22非对称通道内亲疏水结构影响下的纳米气泡滑移效应表面技术(2022年2期)2022-03-03三维鱼体参数化建模浙江大学学报(理学版)(2022年1期)2022-02-21解析壁面函数的可压缩效应修正研究宇航学报(2021年6期)2021-08-13核电CV厚板窄间隙摆动自动焊接工艺参数研究电焊机(2020年3期)2020-09-10一种可排水的外开窗中国建筑金属结构(2019年4期)2019-05-15鱼冷冻之前要去掉内脏饮食与健康·下旬刊(2019年6期)2019-03-09鱼冷冻之前要去掉内脏恋爱婚姻家庭·养生版(2018年11期)2018-11-26推荐访问:动力学 波动 双侧