基于STM32的智能海水油污清洁系统
来源:优秀文章 发布时间:2023-04-17 点击:
周娜,郭丽凤,陈浩,邓畅
(南华大学,湖南衡阳, 421001)
近些年随着海洋资源开采与运输的日趋频繁,海洋石油泄漏等突发事件发生频率越来越高,由此带来的海洋环境污染与经济损失也越来越严重,如“威望号”溢油污染事故、“现代开拓”和“地中海伊伦娜”轮碰撞溢油事故、蓬莱油田溢油等事故不仅造成了巨大的经济损失而且对海洋生态环境也造成严重的破坏。而传统的回收海上溢油的方式存在耗时费力,资金投入大,回收效率低、灵活性差等缺点。因此,很有必要设计一个能有效解决以上问题的海水油污清洁回收系统。
本文设计了一个基于STM32的智能海水油污清洁系统,系统采用无线控制方式,整个系统以智能小船为控制对象,手机APP作为无线控制终端,实现对智能小船的无线远程控制。本系统具备实时性和灵活性强、效率高、省时省力等优点,研究成熟可以在溢油事件发生过后最大限度地降低损失,保护环境,给回收工作带来很大的方便。
■1.1 系统方案设计
本系统主要由4个模块组成,分别是STM32单片机控制模块、溢油收集装置、净化回收装置以及检测装置。系统设计框图如图1所示。

图1 系统设计框图
本系统主要设计思路为:当海上发生溢油事件后,投放围油栏将其控制在一定范围内防止其继续扩散,其次利用动态斜面式撇油器将被污染的海水收集到指定的集油器中;
接着利用智能小船控制亲油疏水磁性纳米海绵进一步回收集油器中的原油;
最后将检测达标的剩余海水排放,即完成回收任务。
■1.2 系统硬件设计
1.2.1 微控制器芯片选择
本设计所选用的微控制器芯片为意法半导体公司生产的32位高性能ARM微控制器STM32F407ZGT6。该芯片的特点是实时性强、低功耗以及便于低电压操作。其工作频率可达168MHz,转换速度快。因本设计需实现对各个模块的控制,故STM32F407ZGT6具有较好的操作性。
1.2.2 系统净化装置—智能小船
目前,在油污处理的各种方法中,物理吸附法因其高效、可回收、不会造成二次污染等特点,被认为是最有潜力的油污处理方法,但现存的吸附剂存在循环效率低、吸附能力不高、对高粘原油失效等不足。因此,为了解决水面油污处理的问题,急需合成出具有高吸油率、可重复利用、环境友好、低成本的海洋油污处理方案,同时开发一种适用于吸附高粘度油污的方法。从满足吸油量大、油水分离选择性好、循环高效的角度出发,本设计的净化材料采用以纳米氧化锌作为纳米涂层的超亲油疏水海绵。
本设计将该材料安装在智能小船上。当检测装置检测到海面油层几乎被清理完毕后,通过蓝牙模块控制小船自动驶向集油器内部,使其在集油器内部游动,回收海水中的残余原油。同时,检测装置实时工作,检测集油器内部海水的原油含量。当达到排放标准时,净化回收装置驶出集油器,收集纳米海绵中原油待用。
智能小船的硬件部分设计框图如图2所示,其主要由单片机控制模块、电机驱动模块、避障模块、遥控模块以及供电模块构成。当小船通过遥控模块接收到上位机发送来的信息后,小船开始工作,即电机驱动模块开始工作;
当避障模块检测到前方存在障碍物后,单片机可控制电机驱动模块做出相应反应从而避开障碍物。供电模块为系统提供5V与3.3V供电。

图2 智能小船硬件电路设计框图
本设计主供电采用12V可充电型锂电池,通过L298N模块中的LM7805稳压电路将12V降为5V供舵机、超声波传感器、红外传感器等模块使用,电路图如图3所示;
同时采用AMS1117-3.3芯片将5V降为3.3V供单片机与蓝牙模块使用,电路图如图4所示。

图3 LM7805降压电路

图4 AMS1117—3.3降压电路
目前市场上常见的电机种类包括直流电机、减速电机、步进电机以及伺服电机等,综合本设计设计需求,本设计选用减速比为1:48的DC3V-6V直流减速电机。但仅靠单片机无法驱动电机,故需采用电机驱动模块来控制电机。
本设计采用的电机驱动模块由L298N构成。L298N是为双路驱动器,一片L298N可同时控制两个直流减速电机做不同的运动,并且具有过热自断和反馈检测的功能。通过主控制芯片引脚使能和PWM波输入就可以控制电机的行止。其中前两个输入使能引脚IN1和IN2控制通道A的输出OUT1和OUT2,默认状态下A相使能引脚与5V短接,此时电机输出功率最高;
后两个输入使能引脚分别控制通道B的输出。主控制芯片可以控制占空比可调输出PWM,通过调节PWM的占空比调节使能时钟的平均电压,从而控制电机的转速。L298N的逻辑图如表1。电机驱动模块电路如图5所示。

图5 电机驱动模块电路图

表1 L298N驱动使能逻辑
本设计的避障模块由超声波传感器HC-SR04与红外传感器构成。因超声波传感器对光照不敏感,故其能在夜间等黑暗环境下使用;
同时因超声波的穿透性较高,使其在水下等严峻环境工作时,仍可保证超声波对障碍物测量的稳定性。同时配合红外传感器可增强对障碍物测量的准确性。
本设计的遥控模块由JDY-31蓝牙模块构成。当小船工作时,其与上位机直接采用有线连接方式较为不方便,甚至会影响小船的正常工作。故本设计采用无线通讯技术中的蓝牙通信方式代替有线连接方式,上位机可通过连接小船的蓝牙对小船的行驶进行控制,实现工作模式的切换。
本设计软件部分主要内容为净化回收装置—智能小船的工作。主要包括电机驱动模块、蓝牙模块以及避障模块的驱动,程序流程图如图6所示。
上位机通过蓝牙模块给小船发送指令,小船工作开始后,当传感器检测到船体20cm范围内存在障碍物时,小船停止开始扫描左右判断后续方向完成避障。小船持续游走直至集油器内部原油检测达标后,通过上位机控制小船驶出。
■6.1 主程序软件设计
本系统的主要功能为通过蓝牙模块接收上位机指令,然后再通过串口传输将指令给各执行模块。在系统的开始运行后,对各模块进行相应初始化操作。初始化完成之后,单片机读取蓝牙模块所传输过来的上位机指令,并进行对应的处理、执行对应的指令。主程序流程图如图7所示。图6 程序流程框图

图7 主程序流程图
■6.2 电机驱动模块软件设计
本设计采用直流减速电机,电路搭建简单,操作方便;
但缺点十分明显,直流减速电机开环控制精度差。因而,选择通过L298N电机驱动模块控制直流减速电机,主控制芯片引脚I/O输出使能控制电机前进,后退和停止。另外,主控制芯片输出PWM波,通过调节PWM的占空比调整平均电压的高低。
本设计选择了单片机的定时器13和定峰值时器14作为PWM的输出时钟。PWM初始化为脉冲宽度调制模式一:采用输出极性为高。由于选择系统时钟,PWM未分频前时钟频率为84MHz,根据计数频率的计算公式TPWM=CLK/PSC;
PWM频率在此基础之上选择分频系数继续分频。计数频率一般在4kHz~10kHz左右,因而本设计中PWM初始化入口参数PSC和ARR分别选择为8399和9;
计算得出的计数频率和PWM频率分别为10kHz和2kHz。
■7.1 系统整体功能测试
在完成了系统的整体设计后,我们团队搭建了一个小型的实验池来模拟本设计的海水油污清洁的过程。
在模拟中,我们采用手机作为上位机。当手机连接好蓝牙后,向小船发送相关控制指令。当按下“驶入”按键时,小船开始工作,自动行驶进集油器内进行原油的回收与水面的净化;
当按下“停止”按键时,小船停止在当前所处位置;
当按下“驶出”按键时,小船结束工作,驶出集油器。在小船工作时,若其靠近集油器内壁,避障模块使小船自动避开,达到了自动避障的目的。图8为手机蓝牙遥控界面。

图8 手机蓝牙遥控界面
系统整体功能测试结果如表2所示。
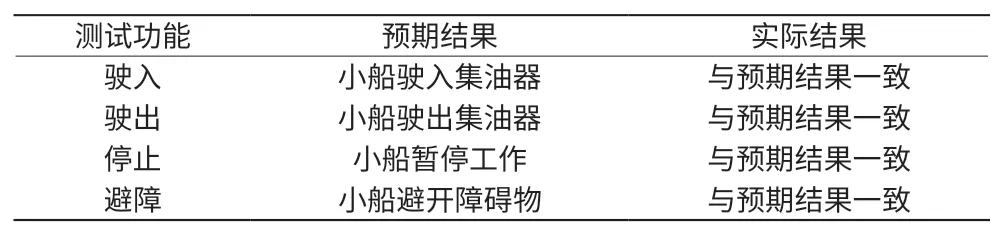
表2 系统整体功能测试表
为保证测试结果的准确性,本系统多次重复测试,测试结果如表3所示。
■7.2 蓝牙模块测试
本系统采用的数据传输方式为蓝牙传输,其有效传输距离较小。本系统的有效传输测试结果如表4所示。由表4可知,当有效距离大于10m后,系统便无法接收到数据,故本系统的数据传输有效距离为10m。

表3 系统重复测试表

表4 系统有效传输距离测试表
本文针对海上溢油造成的海水污染以及资源浪费等严重恶性事件,设计了较为系统的清洁回收方案。主要介绍了其整体结构,软硬件组成以及工作流程等,逻辑上实现了海上溢油事件中对于原油等资源的回收及海水的清洁功能。经研究发现,本课题极具实用意义,对保护环境抢救资源具有战略意义。
猜你喜欢溢油油污小船基于Petri网的深远海溢油回收作业风险演化分析舰船科学技术(2022年20期)2022-11-28近岸溢油漂移扩散预测方法研究——以胶州湾溢油事件为例海洋通报(2020年2期)2020-09-04基于GF-1卫星的海上溢油定量监测——以青岛溢油事故为例海洋通报(2020年2期)2020-09-04教你一个小妙招轻松去油污乐活老年(2019年4期)2019-01-12小船创新作文(小学版)(2018年16期)2018-11-30小船摇啊摇儿童时代·快乐苗苗(2017年9期)2018-01-24灶台清洁的窍门伴侣(2016年8期)2016-08-11感到头疼作文与考试·初中版(2016年17期)2016-06-14有他在的小船,一辈子都不会翻知识窗(2016年6期)2016-05-14对白茆沙水域溢油事故后修复治理的思考中国水利(2015年4期)2015-02-28推荐访问:油污 海水 清洁