GNSS精密工程测量误差抑制
来源:优秀文章 发布时间:2023-04-10 点击:
李祖锋,尹业彪,邢 文,尚海兴,何领军,赵 睿
(1.中国电建集团西北勘测设计研究院有限公司,西安 710065;2.国家能源集团西藏电力有限公司,拉萨 860019;3.长安大学 地质工程与测绘学院,西安 710054)
随着中国经济社会的快速发展和综合国力日益增强,国内各种大型和特种精密工程建设如火如荼,工程难度与复杂程度不断创造新高,对工程测量精度和效率提出了越来越高的要求。在高山区、城市楼群环境开展高精度GNSS工程测量,受站址地形、顶空障碍、周边反射体等观测环境的限制,信号传播过程中会存在大气延迟、多路径效应、测量噪声等误差影响,对工程测量精度控制造成较大困扰。
GNSS高精度观测中,需要采取措施抑制误差。工程测量中,一般采用相位差分定位模式对GNSS观测值进行差分,可消除大部分误差,对于如接收站天线相位中心改正、各种潮汐影响、相对论效应,可以采用建模精确改正。对于不能精确建模的误差,则采用加参数进行估计或使用组合观测值消除。如对流层天顶湿延迟,可采用加参数对其进行估计;
而电离层延迟误差,可采用多频组合观测值来消除。
本文在分析GNSS工程测量中与卫星、信号传播路径、接收机和测站有关的误差源特点的基础上,包含了与测距有关的轨道误差、电离层及对流层延迟误差,天线相位中心偏差,以及与跟踪有关的多路径、非视线和衍射误差影响等,对复杂场景工程GNSS测量误差影响情况进行统计分析,对主要测量误差提出抑制方案,为工程测量误差抑制提供支撑。
目前卫星星历形式主要有两种,一种是采用参考时刻的开普勒轨道根数、轨道摄动参数及其变化率来描述卫星轨道(如GPS卫星的广播星历);
另一种星历采用一定时间间隔直接给出了卫星空间的三维坐标及三维运动速度(如IGS的星历),用户通过内插得到观测瞬间的位置和速度。目前IGS综合精密星历已优于3 cm。卫星单点定位误差的量级大体与卫星星历误差的量级相同,因此厘米级定位必须采用精密星历。轨道误差对相对定位影响相较单点定位要小很多,但在精密定位中影响依然显著。大量实验表明,在GNSS精密定位中,卫星星历误差 对相对定位的结果影响可用下式来估算:
(1)


对于精度要求较高并受工期限制的工程测量项目,建议选用IGS服务所提供的快速星历,对于高精度定位用户就需要选用精密星历。相对定位可保持很高的相对定位精度,通过与IGS站联测,可以获取高精度的绝对坐标,对于高精度相对定位领域依然需要选择精密定位模式,但在一般的工程测量相对定位工作中,应用广播星历可完全满足要求。
电离层延迟误差抑制方法主要有无电离层双频组合模型方法、差分定位法、电离层模型法3种。其中,无电离层双频组合模型法最为常用,该方法采用双频组合消除或削弱电离层延迟误差影响。采用无电离层组合需要注意:
(1)采用双频组合模式,由于电离层延迟中高阶项(f3,f4)的影响较小,一般做略去处理,但当大气中电子含量较大时,高阶项的影响就比较显著,在GPS的BLOCK ⅡF及随后的卫星中增设了民用频率信号L5,这样同时可用3个频率信号来测距,从而可消除电离层延迟中f3的影响。
(2)无电离层组合在消除或者削弱电离层影响的时候,组合观测值的测量噪声成倍增大,可对观测值造成污染,因此在短距离相对定位中,单独采用L1、L2一般可获得更好的解算质量。
(3)双频组合模式适用于无电离层扰动或扰动较弱的中纬度地区,在赤道附近存在着严重电离层扰动,在地极附近扰动影响主要与磁暴活动有关。
对流层延迟分为干大气分量延迟和湿大气分量延迟,在低高度角其最大影响可超过20 m。其中干大气分量可以用一定的模型进行改正,占比约80%~90%。湿大气分量随纬度、高度等因素改变呈现出很大变化,并且随时间变化较快。空气中的水汽和干气预测困难,因此测量中一般测的是干、湿分量混合体,导致准确值难以预测。虽然目前计算湿延迟模型较多,但对流层延迟仍为主要误差来源。
由于相关性,对流层延迟在短基线测量中会很好的消除,对于较长基线,多用随机过程模拟和滤波方法进行参数估算及函数逼近方法模拟改正。部分改正模型,基线天顶方向测量可以达到水平方向相当的水平。常用的对流层延迟模型有:
3.1 Hopfield模型
我们习惯称为霍普菲尔德模型,其目前有了改进型模型ModifiedHopfield,利用全球实测数据,Hopfield发现了一种干折射率的经验表示法,将干分量折射性表示为高度h的函数。改进Hopfield模型表达为:
ΔDtrop=ΔDdry+ΔDwet
(2)
公式(2)中:ΔDtrop、ΔDdry、ΔDwet分别为总延迟、干延迟和湿延迟。
3.2 Saastamoinen模型
我们习惯称为萨斯塔莫宁模型,在高山地区,不同模型求得的天顶对流层延迟差异较大,该模型在高山地区推荐使用。模型将干大气分成地两层积分,折射延迟指数的湿项积分公式:
(3)
ΔDtrop=ΔDz,drymdry(E)+ΔDwetmwet(E)
(4)
公式(3)中:z为卫星天顶距;
T为大气温度,P、e为大气压和水汽压;
选择适应的映射函数,由公式(4)即可得到折射改正数。
对于高精度应用,残留的对流层传播延迟误差可以作为定位解的一部分进行修正。使用该模型后,利用不同卫星信号上的对流层传播延迟误差高度相关性,能够使定位精度改善到几厘米。表1为某水电站中考虑Saastamoinen对流层模型和不考虑模型的解算结果对比。

表1 不考虑与考虑对流程解算结果较差
(1)不考虑对流层模型
Baseline vector(m): SK01(Site 1)to SK06(Site 2)
X-2921.73046Y(E)-1947.09388Z1518.02281L3825.18976
+-0.00310 +-0.00388 +-0.00167 +-0.00293(meters)
Correlations(N-E,N-U,E-U)= 0.11061-0.68163 0.10488
Baseline vector(m): SK01(Site 1)to SK07(Site 3)
X-2692.86221Y(E)-2134.09674Z1870.05110L3911.90068
+-0.00385 +-0.00379 +-0.00223 +-0.00287(meters)
Correlations(X-Y,X-Z,Y-Z)=-0.41047-0.52813 0.61116
(2)考虑对流层模型
Baseline vector(m): SK01(Site 1)to SK06(Site 2)
X-2921.72869Y(E)-1947.07660Z1518.03414L3825.18411
+-0.00432 +-0.00960 +-0.00563 +-0.00304(meters)
Correlations(X-Y,X-Z,Y-Z)=-0.67115-0.77548 0.92941
Baseline vector(m): SK01(Site 1)to SK07(Site 3)
X-2692.84287 Y(E)-2134.10504 Z 1870.04040L3911.88678
+-0.00513 +-0.01073 +-0.00553 +-0.00370(meters)
Correlations(X-Y,X-Z,Y-Z)=-0.60118-0.71622 0.92395
由表1可以看出,从基线解算数据来看,对流层模型对基线数据解算成果影响显著。
摄动天体(太阳、月球)对地球的引力,发生地球表层周期性涨落形成固体潮影响,对GNSS测量影响改正在径向和水平方向分别达到30 cm和5 cm。固体潮包括长期偏移(与纬度有关)和周期项(主要由日周期及半日周期构成)。通过1 d的静态观测,可平均掉大部分的周期项影响。但是对于长期项部分,在中纬度地区,该项改正在径向可达12 cm,即使采用长时间观测,该项影响仍然包含在测站坐标中。根据ITRF协议,虽然通过长时间观测可削弱大部分的周期项影响,但当采用单点定位时,仍然需要实施完整固体潮改正,否则长期项部分对测站坐标会引起径向12.5 cm和北向5 cm的系统误差。由海潮周期性涨落所引起的海潮负荷,主要包括日周期和半日周期项,与固体潮类似,但数值要比固体潮的小一个量级。如果要想获得较高精度动态定位,或在沿海高精度静态定位观测时段小于24 h,必须考虑海洋负荷潮汐改正。
对于工程测量常用的短基线,在GNSS相对定位中,两个测站的固体潮几乎无差异,可通过差分将绝大部分予以抵消,可不考虑此项改正。对于测站远离海洋,可不予以考虑海潮影响。
5.1 天线相位中心偏差影响分析
由于天线机械加工及自身特性因素,天线相位面存在微小波动,不同方向所接收信号瞬时位置并不重合,随着信号输人的强度、方向及高度角的变化,实际相位中心发生相应变化,瞬时相位与设计相位中心不一致,变化通常为几个毫米。性能较好的天线,其相位中心变化最大不超过2 mm;
对于一般的天线,其相位中心变化甚至可能会超过1 cm。天线相位中心偏差包括两部分,第一部分理论设计相位中心与相位观测时参考(实际)相位中心间的偏差,可通过几何改正方法改正;
第二部分偏差量级较小,产生原因主要为:在GNSS接收机测量中,相位观测值都是以实际天线接收相位中心为参考的。
对于短基线,如果采用同型号的天线,基线两端的卫星几何分布几乎完全相同,如果天线指向相同,一般认为其相位中心的特性相同,可将大部分天线相位偏差抵消,若观测时采用相同型号的天线,基线长度不超过100 km,并且进行了严格的天线定向时,可不必进行天线相位中心变化的改正。因此,在高精度GNSS短基线测量时,应尽量使用同类型天线,且同步观测天线指北标志要保持同向,将相位中心变化影响降到最低。当采用不同类型的天线,应首先进行相位中心变化的修正,然后再进行基线解算。对于长基线测量时,无论是否采用相同类型的天线,都必须进行相位中心变化修正后再进行基线解算。天线相位中心变化并不影响水平方向的定位结果,只影响高程方向的定位结果。
在进行高精度GNSS数据处理时,如水利、桥梁等大型获精密工程的施工测量、变形监测,建议对天线相位中心变化进行改正。根据我们相关实验数值表明,如果不考虑天线相位中心变化的改正,其在高程方向引起的偏差将达到相位中心变化的2~3倍。天线相位中心一般通过天线模型进行改正。天线模型如下:
TRM5800(天线型号)NONE TYPE/SERIAL NO
FIELD NGS 3 25-MAR-11 METH/BY/#/DATE
0.0 DAZI
0.0 80.0 5.0 ZEN1/ZEN2/DZEN
(天线座底部到L1平均或者协议或几何相位中心U方向的高度)(从天顶开始天线高度角间隔)
2 # OF FREQUENCIES
IGS08_1719 SINEX CODE
CONVERTED FROM RELATIVE NGS ANTENNA CALIBRATIONS COMMENT
G01 START OF FREQUENCY
0.78 1.13 74.85 NORTH/EAST/UP
NOAZI 0.00 1.37 2.50 3.07 3.28 3.28 3.14 2.91 2.73 2.69 2.74 2.91 3.17 3.65 4.22 5.19 6.57
G01(单频接收机L1频率)END OF FREQUENCY
G02(单频接收机L2频率)START OF FREQUENCY
0.12-2.19 77.25 NORTH/EAST/UP
NOAZI 0.00-1.03-1.11-0.68 0.01 0.82 1.41 1.93
2.19 2.09 1.95 1.74 1.37 0.97 0.67 0.49 0.85
G02(单频接收机L2频率)END OF FREQUENCY
END OF ANTENNA
START OF ANTENNA
天线相位中心变化对基线解算结果的影响,采用模型改正的方法可以削弱。对于不同的天线类型采用的改正模型不完全相同,但基本的原理是相似的。
具体算法为:
(5)
(1)NONE
这个模型对天线相位中心变化不进行改正,即ΔXL1=ΔXL2=0。
(2)ELEV
此模型将天线相位中心变化视为卫星高度角的函数。采用多项式对L1和L2的单差残差进行拟合,得出相位中心随高度角变化引起的观测值的变化。
(6)
据以上方法确定的相位中心变化称为相对中心变化,即一台天线相对于另一台天线相位中心的变化。
(3)AZEL该模型将相位中心变化视为卫星方位角和高度角的函数,按照双线性插值获得对应的天线改正参数值。
5.2 天线相位中心变化双差残余项的影响特性分析
下式等号右边第二项是接收机天线相位中心变化的双差残余项:
(7)
如图1所示,对于同类型天线,如果测站相距不远(如35 km对应0.1 m的高度角差异),且所有天线的定向标志指北,有:

图1 接收机天线相位中心改正示意
(8)
因此,对于同类型天线,在测站相距不远的情况下,双差处理可以消除或者削弱相位中心变化的影响。对于不同类型天线,将公式(6)与公式(7)适当推导,得到先星间单差、再站间双差的形式:
(9)
但在实际作业中,截止高度角一般选为15°,接收机天线对视场内所有环顾顶角在75°之内的卫星跟踪,并参与最后的解算。因此,要得到满足上述条件的卫星对(k,l),是很困难的。因此,对于不同类型天线,双差处理不一定能消除相位中心变化的残余影响,该影响是不能被忽略的。以下列出某控制网测量项目加入天线模型改正和不加入天线模型改正的结果对比,该控制网全部采用了同型号的拓普康HipperII接收机。
不采用天线模型改正
Baseline vector(m): SK07(Site 3)to SK23(Site 5)
X2212.94585Y(E)1999.05312Z-1783.84293L3474.97314
+-0.00484 +-0.00509 +-0.00250 +-0.00378(meters)
Correlations(X-Y,X-Z,Y-Z)=-0.30596-0.51270 0.53109
Baseline vector(m): SK22(Site 4)to SK23(Site 5)
X-209.57876Y(E)53.68182Z-137.57157L256.38044
+-0.00384 +-0.00500 +-0.00213 +-0.00307(meters)
Correlations(X-Y,X-Z,Y-Z)=-0.00742-0.22757 0.51321
采用天线模型改正
Baseline vector(m): SK07(Site 3)to SK23(Site 5)
X2212.94586Y(E)1999.05313Z-1783.84293L3474.97315
+-0.00484 +-0.00509 +-0.00250 +-0.00378(meters)
Correlations(X-Y,X-Z,Y-Z)=-0.30596-0.51270 0.53109
Baseline vector(m): SK22(Site 4)to SK23(Site 5)
X-209.57876Y(E)53.68182Z-137.57157L256.38044
+-0.00384 +-0.00500 +-0.00213 +-0.00307(meters)
Correlations(X-Y,X-Z,Y-Z)=-0.00742-0.22757 0.51321
附加天线改正模型前后数据对比如表2所示。从基线解算数据来看,采用同型号的接收机,其在短基线解算过程中,通过两站之间的差分基本可以完全抵消其影响。对于不同型号天线类型,这里引用公开发表的部分数据。

表2 附加天线改正模型前后数据对比
选取某工程两个各观测时间达到8 h的数据,基线长度在1 km左右。共采用3种不同型号的天线,具体情况见表3所示。

表3 天线配置表
基线解算软件分别采用GAMIT和TGO,其中,GAMIT分別采用RPCV(相对相位中心改正模型)和APCV(绝对相位中心改正模型);
TGO采用Trimble(天宝公司 自定的改正模型)、NGS(相对相位中心改正模型)、IFE模型(绝对相位中心改lE模 型)。共设计5种解算方案,具体如表4所示。

表4 解算方案
解算结果显示,各点的平面坐标差值要明显小于高程坐标差值,在±2 mm以内;
与固定点使用同类型天线测站的高程差值在±2 mm左右,明显小于其他两种天线的结果(最大达到13.9 mm)。另外,使用TRM41249天线的高程差值要小于TRM39105的结果,这是由于两种天线自身性能所导致。

(10)
公式(10)中:Gi和Go分别为第i和最强信号的天线增益;
Ri和Ro为反射系数,当最强信号为直射信号时,Ro=1。
对于建筑物反射的信号,距离延迟Δ=a+b,而对于地面反射的信号有Δ=d-e。相位的偏移为:
(11)
多路径反射如图2所示。图2中地面反射部分在测量型接收机中一般会得到较为彻底的抑制。
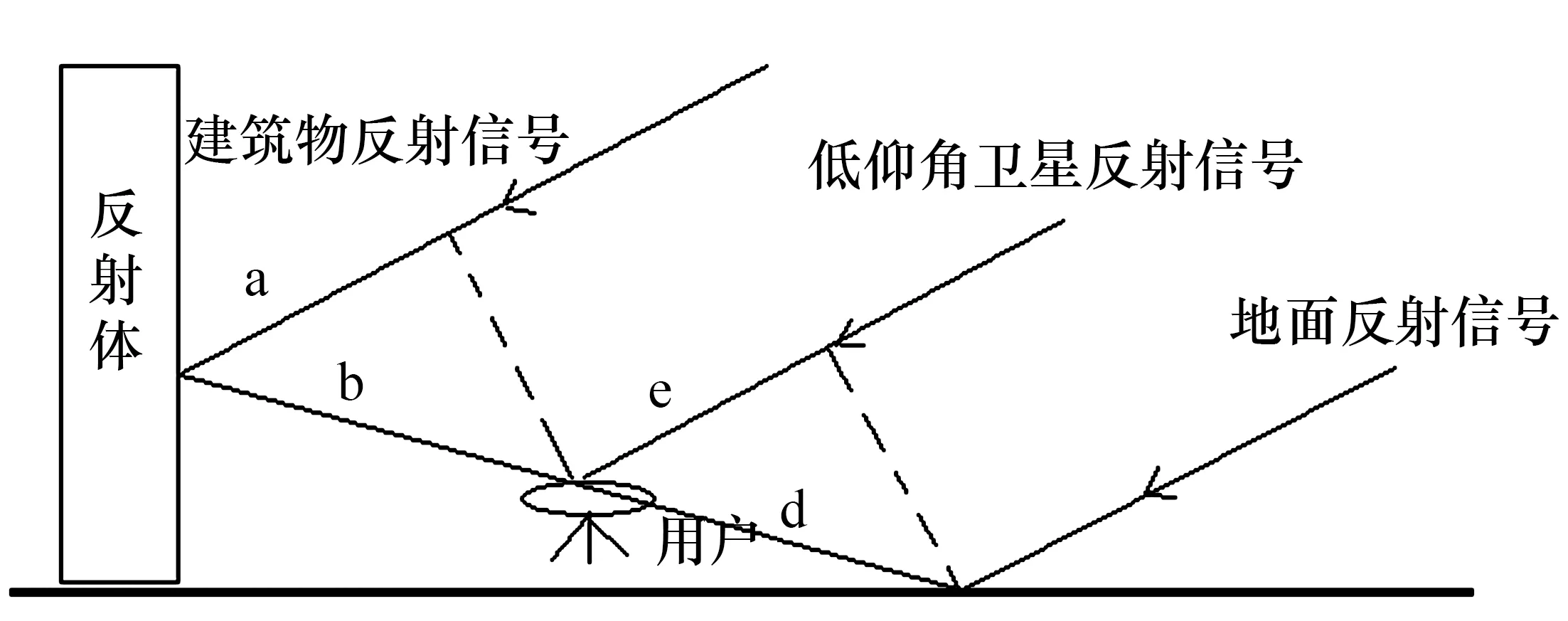
图2 多路径反射示意
公式(11)中:MOD算子表示求余;
φRi为反射的相位偏移,对于人射角小于布儒斯特角的总体上偏平的特殊反射面来说,相位偏移为π弧度。频率偏移可表示为
(12)
总的接收信号可表示为
(13)
公式(13)中:n为反射或衍射信号的数量;
a0=1,Δ0=φ0=δfm0=0。
多路径会导致接收到的信号存在相位偏移,且相位差与路径差成比例,多路径影响可以通过f1和f2码载波相位观测量和伪距观测量组合来估算,这是因为对流层、钟差和相对论效应对载波相位观测量和码伪距的影响大小相同。电离层折射与多路径效应与频率有关,但其影响不同。无电离层模型的码伪距和载波相位求差,可消除提到的所有多路径效应之外的误差。残留的误差反映了多路径效应和噪声的影响。由此可看出,多路径效应是一项非常重要的GNSS测量误差源,会导致相位中心偏差甚至信号失锁,该误差虽非随机误差,但其采用模型抑制的效果并不是很彻底。
消除多路径影响主要有站址选择、接收机选择、软件方法及延长观测时间等措施。选择合适的站址是抑制多路径效应最有效的方式,天线附近的地形地物,例如道路、树木、建筑物、池塘、水沟、沙滩、山谷、山坡等都能构成较强反射,灌木和草地及粗糙的地面能较好吸收信号能量,是较为理想的站址。选择合适的接收机主要是在接收机天线下设置抑径板或者抑径圈天线,或者采用扼流圈天线降低天线后瓣和低仰角增益,采用相控阵列天线技术增加对极化方向相反发射信号的抑制能力,或者对接收机内部跟踪环路进行改进,以达到消除或减弱多路径影响的目的,用户天线附设仰径板,当仰径板半径为40 cm,天线高于1~2 m,可抑制多路径影响。软件方法是在后处理过程中来考虑,主要有半参数法、用小波理论来判断多路径并进行剔除等。
工程建设大多所处环境复杂,接收机外界观测环境会较差,运用延长观测时间的方法,是将多路径误差近似视为一种周期性误差,其周期持续时间一般从几分钟到数十分钟不等,通过适当延长观测时间,可在一定程度上清除或削弱多路径误差的影响。
猜你喜欢 多路径电离层接收机 多路径效应对GPS多普勒测速的影响北京航空航天大学学报(2021年9期)2021-11-02多路径助推肉牛产业稳定发展今日农业(2021年15期)2021-10-14一种电离层TEC格点预测模型空间科学学报(2021年4期)2021-08-30Kalman滤波估算电离层延迟的一种优化方法空间科学学报(2021年2期)2021-07-21基于5.8G射频的多路径识别技术应用探讨中国交通信息化(2019年2期)2019-03-25一种宽带低功耗四合一接收机设计电子制作(2019年24期)2019-02-23一种面向ADS-B的RNSS/RDSS双模接收机设计电子制作(2018年19期)2018-11-14电离层对中高轨SAR影响机理研究雷达学报(2017年6期)2017-03-26数字接收机故障维修与维护电子制作(2016年1期)2016-11-07基于多接收机的圆周SAR欺骗干扰方法系统工程与电子技术(2016年4期)2016-08-24推荐访问:精密 误差 测量