脉冲负载下PWM整流器自适应线性自抗扰控制
来源:优秀文章 发布时间:2023-04-08 点击:
高崇禧, 颜景斌, 李学东, 沈云森, 袁银
(哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨 150080)
随着现代信息技术和电子技术的发展以及装备要求的日益提高,以相控阵雷达作为典型的负载呈现出脉冲性、高频性、高功率瞬变、复杂多工况切换等特点[1]。针对脉冲负载工作特性,传统的不控整流变换系统结构如图1所示,负载侧储能电容一定程度上实现负载功率解耦,减小了整流器输出功率波动,但由于三相电源与负载的功率耦合关系[2],不控整流器输出功率存在负载脉冲频率的谐波,导致三相电流谐波污染严重,且工况发生改变时无法快速稳定输出电压。PWM整流器具有优良的输入输出性能,通过有效的整流控制可抑制三相电流谐波及提高电压稳定速度,但传统的PI双闭环控制下,工况切换时的电压稳定速度和工况稳定时的三相电流谐波两指标之间存在矛盾。
通过改进DC-DC变换器,可实现更好的脉冲负载功率解耦效果,减小脉冲负载对交流侧的功率冲击[3-7],但无法解决工况切换电压响应慢的问题。额外加入主动功率补偿装置能够降低整流器输出电流谐波[8-9],但及时响应工况变化,且使得系统更为复杂,增加了成本。国外学者还提出了一种双DC输出的AC-DC变换器[10],实现脉冲负载和储能元件之间功率灵活分配、降低交流侧电流谐波,但控制策略十分复杂。
改进整流器控制也可提高系统的性能:引入谐振控制器[11]能很好地抑制交流侧电流谐波,但无法实现快速稳定输出电压;
预测控制能预估系统状态,并做出相应控制,实现多控制目标协调[12],但需要较为精确的系统数学模型,复杂多工况切换导致精确数学模型的建立工作尤为困难。模糊PID方法虽然能有效控制动态过程,使得系统在不同状态下具有不同控制效果[13],然而模糊规则和参数的设计很大程度上依赖经验。
自抗扰控制(active disturbance rejection control,ADRC)是由韩京清教授提出并研究的一种对数学模型依赖度低、抗扰性强的控制方法[14-15],被广泛应用于电机控制[16-18]、变流器控制[19-21]、机器人控制[22]等领域,具有优秀的跟踪性能。高志强提出了结构相对简单的线性自抗扰(linear active disturbance rejection control,LADRC)结构并提出“带宽法”[23]用于其参数整定,在线性扩张状态观测器参数确定后,仅需调整线性误差反馈控制器的等效带宽参数即可改变LADRC动态性能,这使得其更适合作为多控制目标切换的需要参数动态变化的控制器。
因此,本文基于等效带宽参数对LADRC动态性能的改变作用,通过设计4自由度规则对LADRC等效带宽参数进行自适应,实现工况切换阶段电压快速稳定、工况稳定阶段三相电流低谐波的控制目标,以解决两者间的矛盾。在此基础上,本文结构安排如下:首先探究PI电压电流双闭环控制下全控桥式整流器的三相电流谐波与电压稳定速度的矛盾机理;
确定自适应等效带宽参数的LADRC控制对该矛盾的适用性后,进行LADRC基本参数设计并分析其等效带宽参数与电压稳定速度和电流谐波的关系;
随后基于等效带宽参数与两者的关系设计自适应规则;
最后通过仿真和实验验证本文所采用控制方法的有效性和可行性。
在图1所示传统脉冲负载系统结构基础上,采用PWM整流器替代不控整流环节,其主要电路参数如表1所示。对于该系统结构,DC-DC变换器及储能电容无法完全实现功率解耦,整流器输出功率存在脉冲成分。整流器电压外环与dq轴电流内环若采用PI控制,为简化分析,做如下假设:
1)系统稳定后交流侧输出电流d轴分量等于d轴电流参考值,即id(t)=id_ref(t)。
2)交流侧输出电流q轴分量iq(t)=0。
3)直流侧电压直流分量等于输出电压参考值,交流分量只考虑脉冲负载基频分量,即:vo(t)=Vo_ref+ΔVocos(ωdt)。其中ωd=2π/T和ΔVo分别为输出电压交流分量角频率和幅值。
4)直流侧功率近似为三角波,其峰峰值为2ΔPo。

图1 传统脉冲负载系统结构Fig.1 Traditional pulse load system structure

表1 整流器参数Table 1 Parameters of rectifier
通过小信号模型推导, d轴电流环开环传递函数为
(1)
其中:KPWM为SVPWM等效增益;
Kp_rec和Ki_rec为PI控制器参数;
Gid_vo(s) 为输出电压Vo到电流d轴分量id的传递函数[24],表达式为
(2)
其中:Rrec表示负载平均阻抗;
Vo_ref为输出电压参考值;
Id为d轴电流的静态工作点;
ud为三相电压d轴分量。设计PI控制器参数为Kp_rec=6,Ki_rec=30对dq轴电流内环进行控制。由PI双闭环结构可得PI电压环的开环传递函数为
(3)
其中Kp、Ki为电压环PI参数。
绘制不同PI参数下的电压环开环传函伯德图如图2所示。
由图2可知,随Kp、Ki增大截止频率增大、相位裕度减小;
因此Kp、Ki增大时电压环带宽提高,对参考电压的跟踪速度提高,但Kp、Ki过大可能导致系统失稳。

图2 PI参数对电压环的影响Fig.2 Influence of PI parameters on voltage loop
以上推导了PWM整流器电压环截止频率与PI参数的关系,以下探究PWM整流器三相电流谐波幅值与PI参数的关系:
由电容充放电过程及假设4),可得输出电压交流分量幅值为
(4)
然后由输出电压PI外环结构可得系统稳定后交流侧输出电流d轴分量时域表达式为
id(t)=ksin(ωdt+φ)+Id_avr。
(5)
其中:
(6)
Id_avr为系统稳定后交流侧输出电流d轴分量平均值。
对式(5)进行反dq变换,可得交流侧输出电流的时域表达式为:
(7)

由式(7)可知,当采用PI控制器进行输出电压外环控制时,交流侧输出电流主要包含ω1、ω2次谐波,且谐波幅值为k/2,由式(4)、式(6)可知,在特定工况下,整流器输出功率大小与脉冲负载频率固定,k主要由电压环PI控制器参数决定,谐波幅值k/2随Kp、Ki增大而增大,且Kp对谐波幅值影响较大、Ki对谐波幅值影响较小。
综上,电压环PI参数Kp、Ki增大时,电压环截止频率增大,电压稳定速度提高,但会导致谐波幅值k/2增大;
反之,Kp、Ki减小时,谐波幅值降低,但会降低电压调整速度。因此在传统的PI电压外环控制下,多工况切换电压稳定速度和交流侧电流谐波两指标之间存在矛盾。
为实现多工况切换电压快速响应、降低工况稳定时交流侧电流谐波的目标,采用自适应控制方法,工况切换时以提高电压稳定速度为主控制目标,工况稳定时以降低交流侧电流谐波为主控制目标,系统控制结构图如图3所示,采用输出电压自适应等效带宽参数的LADRC外环控制与dq轴电流PI内环控制,其中vd、vq为三相输入电压的dq分量,id、iq为三相输出电流的dq分量。

图3 控制结构图Fig.3 Controller structure diagram
由于系统模型随工况变化,电压环被控对象的传递函数也随之发生改变。若使用PI电压外环对其进行控制,通过自适应算法更新其Kp、Ki,由于电压环被控对象传函变化规律不固定,因此需要对不同工况间的相互切换设计不同的自适应参数规则,以保证控制系统的动、稳态性能;
且自适应PI控制器需要同时对Kp、Ki两个参数进行更新,两者的变化规律又各不相同,不利于参数的自适应算法设计,不适当的Kp、Ki关系甚至可能导致系统失稳。以上原因导致自适应PI控制器的设计非常复杂。
相较PI控制器,LADRC控制不依赖精确数学模型,可快速跟踪被控对象输出和扰动,将被控对象简化为固定的标准n阶内部系统(n=1,2,…),且根据带宽法[23],可使用等效带宽参数整定LADRC控制器参数,因此其自适应算法设计相对简单、更适合用于多工况脉冲负载系统的自适应控制。
2.1 LADRC控制器基本参数设计
将式(1)代入图3所示控制结构,可得LADRC电压环的等效被控对象传递函数为
(8)
化简可得电压环等效被控对象为二阶系统,因此使用二阶LADRC进行控制,其控制原理图如图3中LADRC部分所示,主要包含线性扩张状态观测器(linear extended state observer,LESO)、线性状态误差反馈控制律(linear state error feedback,LSEF)。z1、z2、z3为LESO的3个状态变量。
二阶LADRC被控对象的标准形式为
(9)

联立式(2)、式(8),将被控对象改写为式(9)所示标准形式,可得
(10)


(11)
其中:
(12)
因此,设计LESO的状态空间表示为:
(13)
其中:
(14)
记e=z-x,则可得
(15)
再根据带宽法,取β1、β2、β3为:
(16)

结合图3和式(9),设z3=x3,可得
(17)
因此u0到输出Vo之间可以等效为二阶积分环节,因此可设计LSEF为比例-微分控制,则LADRC电压环的闭环传递函数等效为
(18)
取Kp_rec和Kd_rec为下式所示统一参数:
(19)
其闭环截止频率为
(20)
可通过调整ωc对LADRC等效带宽进行控制,因此称ωc为LADRC等效带宽参数。
由式(15)、式(16)可得LESO跟踪误差e的迭代矩阵W的特征方程为
(21)
因此W的特征值为
λ1=λ2=λ3=-ω0。
(22)
由此可知:当ω0>0时W的特征值均为负数,此时LESO稳定且跟踪误差e收敛至0,且ω0越大收敛性越强。
又由式(18)、式(19)可得,LADRC电压外环等效闭环传递函数的极点为
p1=p2=-ωc。
(23)
由上式可见,只需满足ωc>0便可使得电压外环闭环传递函数的几点均分布于复平面左半平面,即系统稳定。且由式(20)可见,其等效带宽参数ωc越大,电压外环带宽越大、系统收敛性越强。
由于LESO为LADRC的内部环节,式(18)所示的LADRC电压环等效闭环传函是基于LESO已稳定的假设推导的,因此在ω0>0且尽量取较大值的前提下,LADRC等效带宽参数自适应规则需同时满足ωc>0且最大等效带宽参数下电压外环收敛速度小于LESO的收敛速度,才能保证自适应LADRC控制器的整体收敛性,即在参数自适应变化时可始终保持系统稳定。
2.2 LADRC等效带宽参数自适应控制
为简化LADRC截止频率与交流侧电流谐波关系的分析,以确定自适应算法规律,在1.2节所做假设基础上另做如下假设:
1)LADRC电压环被控对象传递函数只考虑二阶项,即Gv(s)≈b/s2,其中b为二阶增益。

由此可得在角频率为ωd的工况下,LESO状态变量z1、z2、z3的时域表达式为:
(24)
id(t)=kωcsin(ωdt+φωc)+Id_avr。
(25)
其中:
(26)
对其进行类似式(7)的反dq变换,可得三相电流同样主要包含ω1、ω2次谐波,且谐波幅值为kωc/2。
由式(20)、式(26)可见,随ωc增大,LADRC电压环截止频率增大,即电压稳定速度提高,同时交流侧电流谐波幅值增大。因此,解决变化工况稳定速度和交流侧电流谐波两指标之间的矛盾,需使得工况变化时ωc较大,工况稳定后ωc较小。LESO状态变量z1与参考电压Vo_ref的差值可反映工况稳定性;
z3中包含交流侧输出电流d轴分量平均值b0Id_avr,使得id_ref变化速度相对较慢,延长了LADRC的输出稳定时间;
因此可选(z1-Vo_ref)和id_ref的导数作为自适应控制的输入参数。但上述两输入参数相差较大,因此可对id_ref的导数进行缩小和限幅处理。自适应输出参数即为LADRC等效带宽参数ωc。

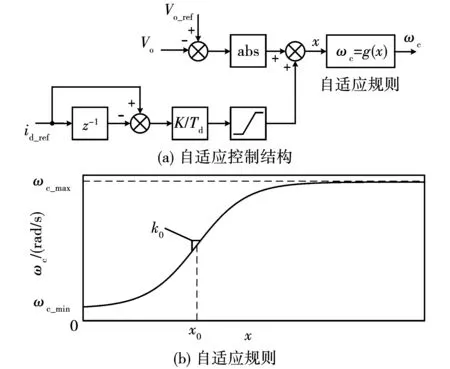
图4 自适应控制结构及规则Fig.4 Adaptive control structure and rule
由以上条件约束,该曲线表达式设计为
(27)
其中:
(28)
降低ωc_min可减小工况稳定时的交流侧电流谐波幅值,增大ωc_max可增加工况改变时的电压调整速度,通过调整x0、k0,则可改变工况变化和工况稳定间的动态过程。对所设计自适应规则进行仿真验证,选取仿真参数如表2所示,由表3所示工况1切换为工况2,自适应LADRC等效带宽参数ωc波形如图5所示,可见所设计自适应控制器在工况变化时能及时增大ωc并维持一段时间,使得LADRC快速稳定输出电压;
工况稳定时能迅速减小ωc并维持为ωc_min以降低交流测三相电流谐波;
且工况切换过程中ωc变化平滑无突变。

表2 仿真参数Table 2 Parameters of simulation

表3 脉冲负载工况Table 3 Working condition of pulse load

图5 自适应参数波形Fig.5 Waveform of the adaptive parameter
所涉及脉冲负载供电系统的动态性能和稳态性能指标要求如下:直流电压动态性能指标为直流侧电压动态时间不超过4倍切换后的脉冲周期,稳态性能指标为三相电流THD不超过3%;
若满足以上动、稳态性能要求,则说明控制器有效。
3.1 仿真分析
为验证该控制器的有效性,在Plecs软件中搭建了仿真模型,仿真参数如表2所示,使用可控电流负载作为脉冲负载,设计了表3所示的4种工况,分别对不同脉冲电流峰值Im、不同脉冲周期T和不同脉冲正占空比下的系统进行仿真分析,观察其工况稳定后的交流侧电流谐波,0~1.5 s为系统空载启动过程。仿真结果如图6~图7所示。
图6为整流器输出A相电流THD波形,空载时由于三相电流几乎为0,因此THD较大,由仿真结果可见,三相电流THD在工况切换时突增,随后迅速降低到3%以下。以上结果说明采用的控制方法能迅速响应工况变化、明显降低交流侧输出电流谐波。
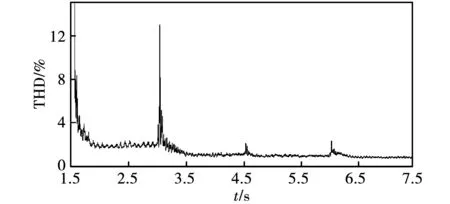
图6 A相电流THDFig.6 THD of the phase A current
图7为工况2稳定后的交流侧A相电流谐波分析结果,分别为提出控制方法的结果和PI电压电流环控制的结果。工况2脉冲负载周期为40 Hz,由仿真结果可见,交流侧三相电流主要包含10 Hz和90 Hz谐波,与分析结果一致,且采用的控制方法相较PI电压电流环控制具有更优良的谐波抑制作用。
3.2 实验分析
为验证所设计控制器的可行性,使用 Ti TMS320F28335 芯片作为控制器,基于Plexim RT Box半实物平台进行实验,实验参数和工况与表2、表3一致。实验平台如图8所示,包含RT Box功率拓扑、DSP控制器、RT Box上位机和示波器。

图7 A相电流谐波Fig.7 Harmonics of phase A current

图8 实验平台Fig.8 Experiment platform
图9分别为4种工况的稳态三相电流波形,由图可见,在不同工况下均能维持良好的正弦电流波形,表4为所提出自适应LADRC控制器和传统PI控制器下,满足上述动态性能要求前提下的各工况的交流侧A相电流THD实验结果,可见在工况2~4下,所提出的控制方法THD均能保持在3%以下,降低了负载的脉冲功率对交流侧的谐波污染,且THD随脉冲负载平均功率增大而降低,与仿真结果基本一致。但在传统PI控制下,要达到直流侧电压动态时间不超过4倍切换后的脉冲周期的动态指标,交流侧电流THD在4种工况下均超过3%,无法兼顾系统的动、稳态性能,与理论分析结果一致。工况1为欠载工况,THD较其余工况较大,加上控制器延时和DSP采样误差等多方面原因,导致其在实际实验时THD超出3%的标准范围,但对比传统PI控制仍表现出明显优势。实验结果说明在多种工况下提出的自适应LADRC控制器均能实现良好的交流侧三相电流谐波抑制效果;
且在表3所示4种工况下THD相较传统PI控制平均降低了36.23%,大幅改善了其电流波形。

图9 稳态电流波形Fig.9 Steady-state current waveform

表4 各工况THDTable 4 Working condition of pulse load
图10和图11分别为工况1切换为工况2的整流器输出电压波形和三相电流波形,为清楚展示输出电压的小范围波动,输出电压波形采用交流耦合。
由图10可见,工况切换时随脉冲负载平均功率突增,整流器输出电压有小幅度降低,电压跌落约1.3 V,随即快速恢复额定电压,动态过程约60 ms,与仿真结果一致。由图11可见,工况发生变化前三相电流波形正弦度较高,谐波较低;
工况改变时自适应参数增大使得控制器优先保证整流器的动态性能,因此整流器三相电流出现小幅突增、谐波增大甚至短时THD超过10%的情况;
电压快速稳定后,自适应参数逐渐减小,整流器的稳态性能逐渐增强,因此可见过渡过程中电流平缓增加、电流谐波逐渐减小直至自适应参数几乎降低到最小值,此时三相电流THD能达到3%以内的稳态标准。

图10 工况切换时的输出电压波形Fig.10 Output voltage when switching working condition

图11 工况切换时的三相电流波形Fig. 11 Three phase current under working condition
实验结果说明,在工况切换发生变化时自适应等效带宽参数能迅速提高以快速稳定输出电压;
输出电压快速稳定后,自适应等效带宽参数平滑减小至最小等效带宽参数以降低交流侧三相电流谐波;
验证了设计的自适应规则的有效性和可行性。
由仿真和实验结果可见,采用的自适应LADRC控制方法能有效解决脉冲负载系统整流器三相电流谐波和工况切换时电压调整速度的矛盾,使得脉冲负载供电系统满足所述动态及稳态指标要求,具有良好的调节能力。
针对脉冲负载系统,研究了一种自适应的LADRC控制方法,解决了多工况切换时的电压调整速度和交流侧电流谐波两指标之间存在的矛盾。推导了控制器截止频率和交流侧谐波与控制器参数的关系,设计了二阶LADRC控制器对整流器输出电压进行控制,并设计了一种4自由度LADRC等效带宽参数自适应规则,实现了脉冲负载多工况切换时快速稳定输出电压、工况稳定时减小交流侧电流谐波的控制目标。理论分析和仿真、实验结果证明了所设计的PWM整流控制器在脉冲负载条件下的有效性和可行性。
猜你喜欢整流器相电流谐波交错并联Buck变换器单电流传感器均流控制重庆理工大学学报(自然科学)(2022年5期)2022-06-18基于过采样相电流重构相位误差抑制方法微电机(2022年1期)2022-03-21三电平PWM整流器下的地铁牵引供电系统探讨科学家(2021年24期)2021-04-25高速列车牵引整流器多类故障联合诊断方法自动化学报(2019年12期)2020-01-19SFC谐波滤波器的设计及应用电子制作(2018年18期)2018-11-14自适应的谐波检测算法在PQFS特定次谐波治理中的应用通信电源技术(2018年5期)2018-08-23沟道MOS 势垒肖特基(TMBS)和超级势垒整流器电子制作(2017年19期)2017-02-02电网谐波下PWM变换器的谐波电流抑制电力系统及其自动化学报(2016年5期)2016-12-01枢纽牵引供电系统谐波问题探讨电气化铁道(2016年6期)2016-05-17三相电压型PWM 整流器研究通信电源技术(2016年4期)2016-04-04推荐访问:整流器 脉冲 负载