无人机声学定位技术综述
来源:优秀文章 发布时间:2023-03-10 点击:
陈鹏 陈洋 王威
(长安大学 信息工程学院,陕西 西安 710061)
近年来,随着飞行控制技术的进步,多旋翼无人机(UAV,以下简称无人机)广泛应用于航拍、地质勘测、地图绘制、消防应急等领域[1]。由于行业规范的滞后以及无人机厂商的激烈竞争,无人机的更新迭代频率高,且逐渐趋于低操作门槛、大载荷、长航程。无人机技术的进步在极大提高各行业效率的同时,也滋长了“黑飞”行为,如无人机入侵机场造成航班延误,在高价值区域进行非法偷拍等。为了规范无人机的飞行行为,政府部门和相关无人机技术公司推出了一系列政策,如为无人机划定禁飞区,实行无人机飞行执照制度等[2-4]。
然而,上述政策仅仅从制度角度对常规无人机进行了限制,难以应对组装及改装无人机的“黑飞”。如何对无人机进行探测和反制是无人机领域内亟待解决的问题。目前对无人机的探测手段主要有雷达探测[5-6]、射频探测[7]、图像探测[8-9]、光电探测[10]和声学探测[11-17]等。雷达探测技术利用了无人机反射回来的电波信号来测量无人机的速度、方位等信息,将雷达手段应用在低空无人机的探测上存在着探测盲区。无人机飞行高度低、低空区域环境复杂、杂波干扰严重等因素导致了雷达探测性能不佳。射频探测采用频谱感知技术(即检测无人机和控制器之间的射频信号),其通信信号的独特性可以用来检测和反制低空无人机。为了增强无人机在低空区域的抗干扰能力,大多数厂商设计无人机通信机制时常采用跳频传输,这导致想要在短时间内获取窄带信号频段变得很困难。图像探测法首先得到摄像头捕捉到的图像,然后采用深度学习方法进行特征提取,进而识别无人机。此方法受限于摄像头的分辨率,想要通过提升镜头的质量来提高检测率,代价会非常昂贵。光电探测利用光电传感器对无人机进行检测,由于无人机具有“低小慢”的特点,其红外辐射、光辐射太小,利用传感器检测信号误差太大。
声学探测通过对声学传感器阵列接收到的无人机噪声进行信号处理,探测并跟踪低空无人机。噪声的谐波特性表现在频谱带宽内出现周期性的谱峰。正是因为其独特的谐波成分,声学探测得以适用于检测多旋翼和固定翼无人机。声学探测的困难点在于低信噪比下对无人机信号的识别。随着阵列信号处理技术的发展,传统声学定位算法不断地更新迭代,发展出一系列精度高、抗干扰类算法,使得声学技术补充了雷达、光电探测在低空无人机检测的短板。
本文针对无人机旋翼噪声这类特殊声源,剖析了其声学特性,在时域和频域中对声学定位算法进行了分析对比,给出了时域和频域定位方法的优缺点,并统计了近年来国内外基于声学定位低空无人机的实现方法,最后对目前低空无人机声学定位系统存在的问题以及改进方法进行了讨论。
声学探测具有全天候、全被动、低成本的特点,在检测低空无人机上准确度较高,近年来颇受众多学者的关注。声学定位技术按照计算量可分为波束形成器技术[18-23]、高分辨率空间谱估计技术[24-35]、时延估计技术[36-45]。其中时延估计技术属于时域波达方向(DOA)估计法,波束形成器技术和空间谱估计技术属于频域DOA 估计法。声学探测技术的原理是:通过有规则的阵列传感器采集无人机旋翼所发出的声信号,并对声信号进行提取、分析,再运用信号处理方法完成对声源目标的定位。下面介绍声源定位算法的发展历程和现状。
波束形成器技术的基本思想是通过将各阵元的输出信号进行加权求和,在一段时间内将阵列波束指引到一个方向,这个方向就是空域内信号能量最大的方向。根据这个思想,可以得到期望信号最大输出功率的导向向量,即DOA 方向。波束形成器因加权向量求解方式的不同,可分为静态波束形成器和自适应波束形成器。静态波束形成器加权向量通常事先已设计好,不受接收数据的影响,算法复杂度低,抗干扰能力弱。自适应波束形成器的核心在于可以实时通过对接收数据的分析,自动地调节加权向量的构成比例,增强期望方向的权值,抑制干扰和噪声。其中最为经典的是Capon 波束形成器[20],理想情况下Capon 波束形成器可以让期望信号无失真通过,并且使波束输出噪声的方差最小。在过去的几十年发展中,诸多学者研究了在存在模型误差的情况下如何提高自适应波束形成器的性能,如对角加载法[21]、特征空间法[22]、独立数据微分约束法[23]等。这些方法虽然在一定程度上增强了自适应波束形成器的稳健性,但适用范围也是有挑剔性的。对角加载样本矩阵求逆的方法,虽然可以减小噪声特征值的扩散,使信号子空间和噪声子空间保持正交,但对角加载量一般难以选取,直到现在学界也没有给出对角加载量选取的标准,选取不当则会导致性能失效。特征空间法在低信噪比下无法准确估计出信源数,也会造成极大的误差。波束形成技术理论上具有优良的性能,但在实际应用中却不尽如人意。在实际的阵列阵型中不可避免地会存在各种误差,如阵元标定误差、阵元响应误差、接收信号相干等,误差的存在,使得波束形成器的性能难以达到理论的效果。再者阵列孔径不可能为无限大,频率分辨率不可能达到无限小,导致了传统的波束形成法难以突破瑞利限。
超瑞利限的方法称为超分辨方法。多重信号分类算法(MUSIC)是Schmidt[26]提出的,它突破了传统波束形成器估计信源DOA 的瑞利限,这是一个伟大的跨越。1986 年Paulraj 等[27]提出了旋转不变子空间法(ESPRIT),随后Rao 等[28]提出了一维Root-MUSIC算法,Viberg等[29]提出了加权子空间拟合法(WSF),后续又有许多窄带高分辨率算法被相继提出[30-31]。在高分辨率空间谱估计技术中以MUSIC为代表的子空间类方法颇受关注。因其在任何形状阵列下都可以得到高分辨率效果,当信源不相干时,在高信噪比下可以得到渐进无偏的估计量,是最接近克拉美-罗界(CRB)的一类超分辨率谱估计技术。Root-MUSIC 利用多项式求解代替了谱峰搜索,可以看作是MUSIC 算法的另一种表达形式,但此法减小了大量的计算量。究其原因是省去了对样本矩阵求逆的步骤。ESPRIT 算法利用了子空间的旋转不变性,即利用了阵列间的移不变性而引起的信号子空间的旋转不变性,但因为阵列的特殊性,ESPRIT 算法并不适用于所有阵型,如均匀圆阵等,不过此方法不需要对全局进行搜索,只需进行多次特征分解即可求得较为精确的解,运算速度较快。ESPRIT 算法按照计算方式可分为最小二乘法(LS)[27]和全局最小二乘法(TLS)[32]。WSF 算法结合了不同的方位估计算法,在信源不相干的情况下协方差矩阵的误差估计达到了最小。但WSF算法对参数设置的要求高,且运算量巨大。频域DOA估计法都是假设信源是远场窄带的情况,对于无人机噪声这类宽带信号,可以将宽带信号进行滤波处理,滤过后的信号可以视为窄带信号,均适用于各种经典谱估计算法。下面列举近年来一些学者在MUSIC 算法的贡献。如Wang 等[33]提出了空间平滑MUSIC 算法,解决了信源相干时信号子空间扩散到噪声子空间问题,但此方法间接降低了阵列孔径,无法分辨角度相近的信源,在估计非相干信源时性能较差,且计算量大。邓艳容等[34]针对远场宽带相干源信号,提出了改进的宽带信源 MUSIC 算法,取得了较好的DOA 估计效果。李蜀丰等[35]结合了时延估计技术和MUSIC算法,将不同阵元间的时延误差引入导向矩阵中,降低了传统MUSIC算法空间谱中伪峰出现的概率。限于篇幅,在MUSIC算法的基础上发展出的一系列算法不详细罗列。
时延估计技术是在时域估计信号DOA 的方法。根据检测方法的不同,时延估计可分为主动时延估计和被动时延估计[40]。主动时延估计(如雷达、声呐等)通过接收目标的回波,利用滤波技术获得时延,从而计算出目标的距离。被动时延估计利用了同声源信号到达不同阵元之间的时间延迟,即到达时间差来估计目标位置。此类方法原理简单,只要获得时延,根据阵列的结构就可以估算出距离信息。计算量相比波束形成器技术和高分辨率谱估计技术要小得多。被动时延估计技术的实时性强,结合多种权函数,大体上可分为4 类:广义互相关(GCC)法[36-37,41]、最小均方(LMS)自适应滤波法[42]、互功率谱相位(CSP)法[38]、二次相关(SC)法[43-45]。广义互相关法在基本互相关的基础上通过增加权函数滤除噪声和干扰的影响。LMS自适应滤波法需要不断的迭代,以保证互相关值的均方最小,这将会带来巨大的计算量。互功率谱相位法在广义互相关的基础上再次加权,滤除了幅度信息,仅保留相位信息;
两次加权后的结果带来更好的抗噪和抗干扰。这些方法都是基于功率谱或互相关函数来实现,难免少不了傅里叶变换(FFT)。傅里叶变换的前提是信号为平稳信号,实际中大多数情况下的阵列接收信号为非平稳信号,这时使用傅里叶变换很容易出现频谱泄露,加大了分析错误的风险。为了减小频谱泄露,可以对原信号序列加窗函数,如汉宁窗、三角窗、海明窗等,选取合适的窗函数可以避免吉布斯效应[46]。为了在非平稳信号情况下获得更好的时延估计效果,分数阶傅里叶变换[47]提供了一个全新的时频分析方法,使得时延不仅出现在分数阶傅里叶变换结果的相位中,也与分数阶傅里叶域频谱的位置有关。被动时延估计技术虽然计算量小,实时性强,但也有一些不足。时延估计对单目标定位(如对单目标无人机飞行的捕捉和定位)效果较好,但在多目标的噪声分析中效果不理想,时延精度易受混响的影响。
无人机的噪声主要来源于其旋翼和电机,而这种声源往往是宽带信号[48]。无人机在飞行状态时,旋翼高速旋转产生下洗气流从而获得升力,旋翼叶片气动发出的噪声为宽频噪声。体积较小的无人机,其旋翼旋转产生的噪声为载荷噪声,表现为一系列离散噪声。无人机的电机产生的噪声属于电磁噪声,此类噪声频率较高。当高速旋转的旋翼产生的气流流过无人机时,会产生频率较低的气动噪声[49-50]。多种噪声叠加在一起,构成了具有谐波特征的噪声信号。这些谐波由一个基频谐波和高次谐波组成,一般高次谐波频率为基频谐波的整数倍[51]。Yakubovskiy等[52]将多种类型的旋翼无人机产生的谐波进行了分类,并给出了谐波基频频率的计算公式。
无人机声源为宽频噪声,声波能量分布在各个频率上。通常得到的无人机采样数据为非平稳信号,经典的傅里叶变换对非平稳信号的分析效果不佳。为了直观地看出噪声频率分布随时间的变化,本文利用短时傅里叶变换(STFT)对噪声进行分析。
图1为实验中无人机噪声的时频图,同频率的强度大小体现在不同的颜色上。图2给出了1 000 Hz内无人机噪声的频谱。谐波频率分量在时频图中体现为明显的线谱,无人机噪声频谱由线谱和线谱间成分组成,这就增加了宽带噪声的复杂性。但宽带信号会带来更多的信息,这一特性对时域互相关定位是有益的。因为互相关法对信号的频带范围较敏感,频带范围越大,包含的信号量越多,时延估计类方法的均方误差反比于信号等效带宽的平方[39]。基于这个原理,可以利用时域的信号处理方法实现无人机的定位。

图1 无人机噪声时频图Fig.1 Time frequency diagram of UAV noise
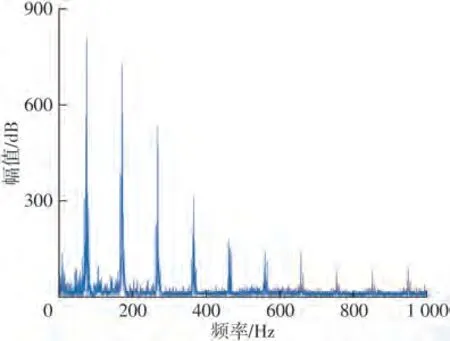
图2 无人机噪声1 000 Hz内的频谱Fig.2 Spectrum of UAV noise within 1 000 Hz
无人机的时频图中存在着较明显的线谱,这些线谱的信噪比远大于线谱间成分,因此可以将线谱按照频率划分,每个线谱的频率附近可视为窄带信号,这样就可以使用经典的窄带DOA估计方法来定位无人机。宽带信号的频率成分较为复杂,划分出的窄带信号分解出信号子空间和噪声子空间都不相同,其阵列流型是频率的函数。在宽带信号的DOA定位中使用最多的是非相干信号子空间处理方法(ISM)[53-55]和相干信号子空间处理方法(CSM)[56-57]。这两种方法本质上都是将宽带信号转化为窄带信号来实现。非相干信号子空间处理方法通过对已分好的各个窄带信号进行窄带DOA估计,然后将估计结果进行平均得到宽带DOA估计结果。相干信号子空间处理方法引入了聚焦变换,通过聚焦矩阵将各个不同频率的子带聚焦在一个频点(参考频率)上,得到一个参考频率的协方差矩阵,之后用窄带处理方法得到宽带信号DOA。这种利用了空间所有信息的聚焦变换虽然节省了大量的计算,但前提需要对信源来波方向进行预估,预估的误差直接影响了CSM的性能。
3.1 远近场模型判别
根据无人机与阵列之间的距离不同,噪声信号在介质中的传播模型可分为近场模型和远场模型。在近场模型中,阵元接收信号不仅和到达角度有关,同时也受距离的影响,此时球面波的模型更贴近实际。如果声源距离阵列较远,信号到达阵元时的相位信息可忽略,入射角度差异相差不大,则可用平面波来拟合信号的传播。
判断远近场的标准为

式中,L为麦克风阵列中心与无人机位置的距离,D为阵列孔径,λmin为信号的最小波长。
依据式(1)可以选取合适的模型。图3 为均匀线阵接收声场信号的示意图,可以直观看到,两种情况下信号到达阵元时的入射角有差异,因此选取合适的模型是保证定位精确的关键。

图3 两种声源传播模型示意图Fig.3 Schematic diagram of two sound source propagation models
3.2 信号模型
考虑一个空间存在l个波长为λ的远场窄带信号,这些窄带信号从不同的方向ϕi(i= 1,2,…,l)入射到由M个阵元组成的均匀直线阵上,阵元间距为λ/2。信号可以表示为

式中,ui(t)为t时刻接收信号的幅度,φ(t)为相位,ω为信号的角频率。信号源为远场窄带信号的情况下,信号幅度及相位衰减差距可以忽略,即

因此,延时τ时间后的信号为

则第q个阵元接收信号为

式中,nq(t)为第q个阵元在t时刻接收的噪声。
式(5)省略了各个阵元对信号的增益,因为阵元均为各向同性,其增益可归一化为1。本文以阵列中的第一个阵元为参考阵元,则整个阵列的接收信号可表示为

a1为第一个窄带信号的导向向量,ω0= 2πf=2πc/λ,c为声速,τij为阵列中第i号阵元相对于参考阵元接收第j个信号的相对时延。阵列接收信号模型的矢量形式为

式 中:A为 阵 列 流 型 矩 阵;
S(t)=[s1(t),s2(t),…,sl(t)]T,为t时刻下l× 1 维的信号包络表达式;
N(t) ∈RM×1,为高斯白噪声矩阵。
时延估计的误差直接影响了估计无人机位置的精度,随着信号处理技术的不断发展,快速准确地获得信号之间的相对时延,早已成为信号领域的课题,成为人们研究的热点问题之一。时延估计技术主要有基本互相关算法、广义互相关算法[36-37,41]、自 适 应 最 小 均 方 滤 波 器 算 法[42,58]和 二 次 相 关 算法[43-45]等。基于到达时间差(TDOA)的定位方法对宽带信号定位具有灵敏度强、相关峰高、定位误差小、设备可隐秘安置的特点,可以实现对低空无人机的定位。本文从时域DOA 估计角度出发,首先介绍基本互相关算法和广义互相关算法的原理,随后通过仿真对相关算法的性能进行了对比。
4.1 基本互相关算法
时延估计技术通过比较两个阵元接收信号的互相关函数来估计时间延迟。假设两个等间距为半波长的阵元接收声源信号为s(t),由于环境的干扰,信号在传输过程中会伴有干扰和噪声,则t时刻两阵元的接收信号表示为

式中:x1(t)和x2(t)分别为两阵元接收到的信号;
τ1、τ2分别为两通道信号传输的时延;
n1(t)、n2(t)为高斯白噪声,假设噪声和声源信号s(t) 互不相关。
为了表示方便,以第一个阵元为参考阵元,则式(9)可表示为

x1(t)和x2(t)的互相关函数为
式中,Rss(·)为信号相关函数,Rsn(·)为信号与噪声的相关函数,Rn1n2(·)为噪声相关函数。
考虑到噪声和信源信号之间的不相关性,则信号与噪声之间的互相关函数为

式(11)修正为

当时延τ=τ12时,互相关函数R12(τ)达到最大。根据相关函数性质,可以通过求解最大峰值对应的τ值来估计两路信号之间的时延值。
4.2 广义互相关算法
在实际中,由于采集设备限制,采集到的声学数据序列不可能无限长,而且只能处理有限长的采样序列,现实场景下环境噪声并非严格不相关,这就对基本互相关时延估计提出了巨大的挑战。互相关法在信噪比较低时,峰值会淹没在噪声中,严重时会出现多个伪峰,导致DOA 估计不准确。为了改善上述情况,诸多学者提出了广义互相关法,利用加权函数增强信号的信噪比,使高频部分增强,低频部分削弱,以提高时延估计精度。
由维纳-辛钦定理[59]可知,功率谱密度和互相关函数为一对傅里叶变换对,即

由于噪声和信号间互不相关,噪声之间也不相关,即

式中,x1(t)、x2(t)经过傅里叶变换得到x1(ω)、x2(ω),(ω)为x2(ω)的复共轭,G12(ω)为x1(t)、x2(t)的功率谱。
对互功率函数加权再进行逆傅里叶变换,得到广义互相关函数

式中,w(ω)为加权函数。w(ω)有多种表达式,如表1所示,在不同情景下选取合适的权函数进行处理,可以降低噪声对时延估计精度的影响。
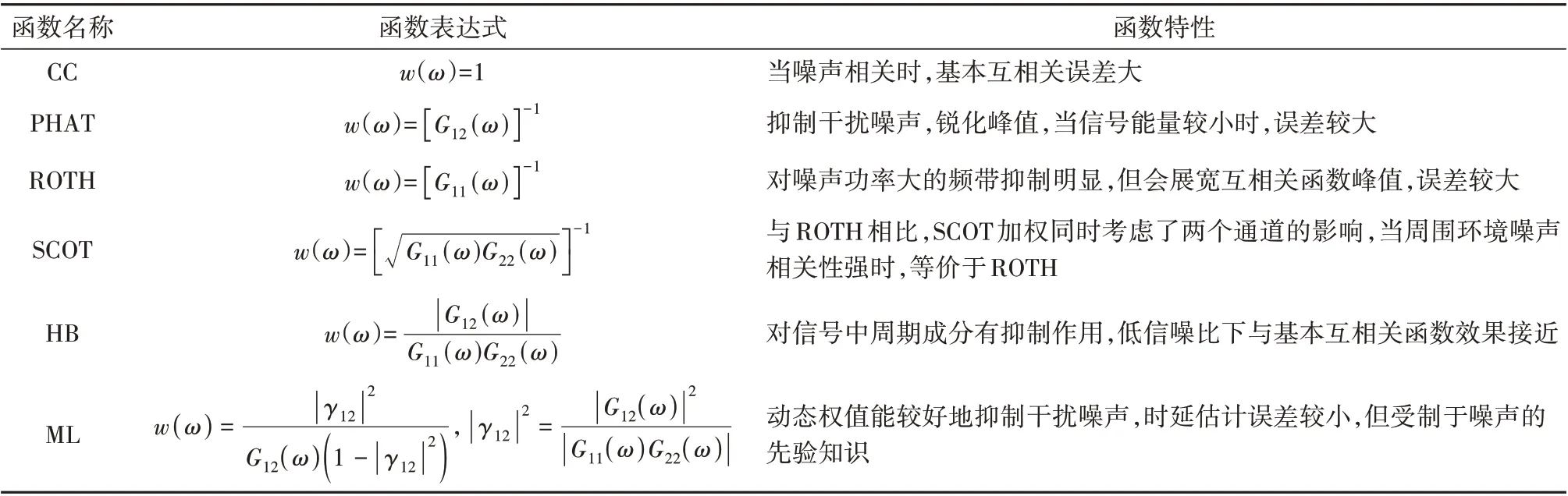
表1 加权函数表达式及特性Table 1 Weighting function expression and characteristics
4.3 时域DOA估计仿真结果分析
时域DOA 估计仿真中采用宽带信号源,假设声源为远场平面波,入射角为20°,阵元数为10。采用基本互相关、多种广义互相关和二次互相关[43-45]算法,在不同信噪比和快拍数下进行蒙特卡洛实验,角度估计均方根误差(RMSE)如图4所示。从图中可以看出,GCC-ROTH算法的性能收敛速度较慢且估计误差较大,GCC-PHAT、GCC-SCOT、GCC-HB、GCC-ML 算法的估计误差收敛速度随信噪比的增大比GCC-ROTH算法快,且GCC-PHAT算法的收敛速度比GCC-SCOT 和 GCC-HB 快。在实际环境中,由于存在干扰和噪声,这些因素都会使相关函数出现伪峰,广义互相关算法的设计使其具有一定的抗噪声抗干扰特性,GCC-PHAT加权舍弃了互频谱的幅值,保留了信号的相位,运算精度得到了提高,在实际中得到了广泛的使用。

图4 互相关算法的角度估计结果Fig.4 Angle estimation results of cross-correlation algorithm
时延估计算法虽然灵活多变,在权函数的选取上有着较大的选择性,可根据实际情况达到过滤噪声和混响的效果。但时延估计算法对信噪比敏感,在低信噪比及混响严重的情况下,对目标DOA的估计性能将大幅度降低。所有的时延估计算法都依赖于设备采样速率,在低采样率下时间分辨率低,时延估计精度达不到,而过高的采样率会带来估计成本的增加。若有多个目标声源同时被阵列接收到,则互相关算法的谱峰会被干扰,在低信噪比下时延估计算法将失效。时延估计算法的优势在于计算量小,有较好的实时性,适用于对单目标进行定位。
无人机噪声频谱线谱成分明显,容易将宽带信号分解出不同频率的子带,进行相关窄带DOA处理。窄带高分辨率定位算法的精度高于时延估计类算法[38]。基于子空间的定位技术来源于现代高分辨率谱估计技术,也是阵列信号处理研究最多、应用最广的技术之一。本文从频域角度出发,阐述典型的窄带子空间类算法,并通过仿真比较了算法的性能。
5.1 MUSIC算法
MUSIC算法是基于窄带信号的子空间算法,是较早提出的经典算法。采用3.2节信号模型,假设一个具有M个全向传感器的阵列,阵列接收l个远场信号(l<M)。M个阵元等间距排列,相邻阵元间距为d,l个远场窄带信号si(t)入射到阵列上(i=1,2,…,l),阵列在某时刻t的快拍接收信号可看作一系列平面波相加,表示为

为信号s(ϕi)的导向向量。
通常情况下将均匀线阵中第一个阵元设为参考阵元,阵列整体接收数据协方差矩阵可表示为

式中,Rs为信号相关矩阵。
高斯白噪声的归一化互谱矩阵为单位矩阵I,互谱矩阵对角线元素相同,均为σ2。由于声源数量l小于阵元数M,认为ARsAH是满秩矩阵,所以式(19)可表示为

式中:V是以vi为元素的列矩阵;
Λ是以特征值λi为元素的对角矩阵;
Λs是期望信号的特征值集合,包含L个较大特征值;
Vs是信号特征值的特征向量,表示信号子空间;
Λn是噪声的特征值集合,包含M-L个较小特征值;
Vn是噪声特征值的特征向量,代表噪声子空间。
由子空间理论得

因为Rs为满秩非奇异矩阵,所以式(21)可变为

表明阵列流型矩阵中各个列向量与噪声子空间正交,即

考虑到实际中采样数据矩阵有限,故可以将样本协方差矩阵最大似然估计为[60]

式中,U为快拍数。在Hermitian空间中,由信号子空间和噪声子空间具有完备的正交性,可以得到空间谱系数为

P(ϕ)的极大值对应的ϕ为信源的方向。在直线阵列下,阵元数为8,间距为半波长,快拍数为80,两信源入射角度分别为-55°和20°,MUSIC 算法的角度估计在不同SNR下的均方根误差仿真结果如图5(每点为5 000次蒙特卡洛计算结果)所示。

图5 MUSIC均方根误差曲线Fig.5 MUSIC root mean square error curves
5.2 ESPRIT算法
ESPRIT 算法利用了两个阵列的移不变特性而引起信号子空间的旋转不变性。子空间旋转不变性只需要进行特征分解,不需要对每个来波方向进行扫描,节省了大量的计算。假设一个包含M个阵元偶的平面阵列,每个阵元偶包含两个具有相同特性的阵元,已知两阵元相差位移向量为d。有K个远场窄带信号入射到阵列,K<M。将阵列分为两个平移量为d的子阵Zx和Zy,子阵Zx由x1,x2,…,xM组成,子阵Zy由y1,y2,…,yM组成,第i个阵元偶的接收信号可表示为

子阵Zx和Zy在t时刻的输出为


阵列的输出信号为

根据样本矩阵Z估计信号DOA 方向,则需要对Φ进行估计。对信号自相关矩阵进行分解,求出信号子空间和噪声子空间。信号子空间是由X和Y组成,样本矩阵Y张成的信号子空间相对于X张成的子空间旋转了一个空间相位。对自相关矩阵进行特征分解得到信号子空间和噪声子空间,即

由于阵元数大于信源数,则必存在一个唯一、非奇异的满秩矩阵T∈CK×K,且

因为阵列的移不变性,Vs可分为VX∈CM×K和VY∈CM×K。由式(34)可得

式中,Ψ=T-1ΦT。可以看出,VX和VY张成的信号子空间有一定的相似性,矩阵Φ的对角元素为T-1ΦT的特征值。矩阵Φ的求解方法有最小二乘法[27,61]、总体最小二乘法[32,62]等。
在入射角度为60°和-20°时,8阵元线阵下两种求解方法的角度估计均方根误差随SNR的变化如图6所示。从图中可知,随着SNR 的提高,LS-ESPRIT和TLS-ESPRIT 的性能差异逐渐变小。由于TLSESPRIT 求解比LS-ESPRIT 求解增加了一个构造矩阵,因此降低了两个子阵张成信号子空间的误差。在低信噪比下,TLS-ESPRIT 的均方根误差比LSESPRIT 低,具有更强的抗干扰性。对比可知,全局最小二乘子空间旋转不变法可以作为代表和后续谱估计方法进行比较。
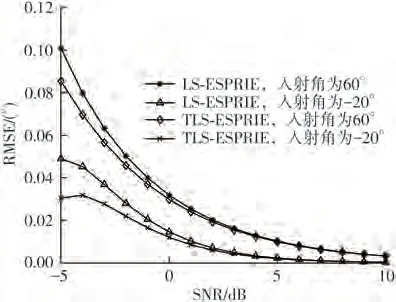
图6 LS-ESPRIT和TLS-ESPRIT在不同SNR下的均方根误差Fig.6 Root mean square errors of LS-ESPRIT and TLS-ESPRIT under different SNRs
5.3 空间谱估计方法
波束形成器分为常规波束形成器和自适应波束形成器,其中自适应波束形成器最经典的为最小方差无畸变响应(MVDR)波束形成器。从式(20)得到的样本协方差矩阵可分解为信号子空间和噪声子空间。实际中信号空间也包含着干扰信息,这就导致了子空间计算的误差。因此,样本矩阵可修正为

MVDR波束形成器的原理为:在对期望信号无失真输出的情况下,使输出噪声的方差最小,即

式中,w为波束加权向量,a0为期望信号导向向量,wHRnw为波束输出噪声功率。求解此类恒等式约束二次型最优化问题,可以通过拉格朗日乘子法求解闭式解,得到的最优权向量为

当样本矩阵不包含期望信号成分或者干扰和噪声的互谱矩阵已知时,MVDR波束形成器可以达到自适应波束形成的最优上限[19]。实际情景下,很难将期望信号和干扰信号严格区分开,这样的MVDR波束形成器并不实用,所以采用有限快拍的接收数据的互谱矩阵来代替干扰加噪声互谱矩阵Ri+n。依据文献[60]可表示为

样本矩阵求逆(SMI)的空间谱估计为

式中,am是入射角为ϕm的信号的导向向量。
为了降低噪声特征值的分散,文献[18,21]分别提出了对角加载法(LSMI),即在原样本互谱矩阵上叠加一个对角阵,


5.4 频域DOA估计仿真结果分析
仿真条件如下:声源为远场窄带信号,阵列为8元均匀线阵,阵元间距为半波长,入射角度为-55°和20°,频域DOA估计的均方根误差如图7所示。
从图7(a)可知,随着信噪比的提高,ESPRIT、MUSIC、MVDR 的估计误差下降明显,高信噪比下角度估计误差接近,其中MUSIC 的收敛速度最快,性能较优。对角加载波束形成法因为在样本协方差矩阵中人为添加了对角矩阵,间接地降低了期望信号的成分,抑制了噪声特征值的分散,因此性能优于SMI-MVDR。ESPRIT 用对样本矩阵进行特征分解代替了求逆过程,因此运算速度较快,但此法牺牲了估计精度,误差最大。
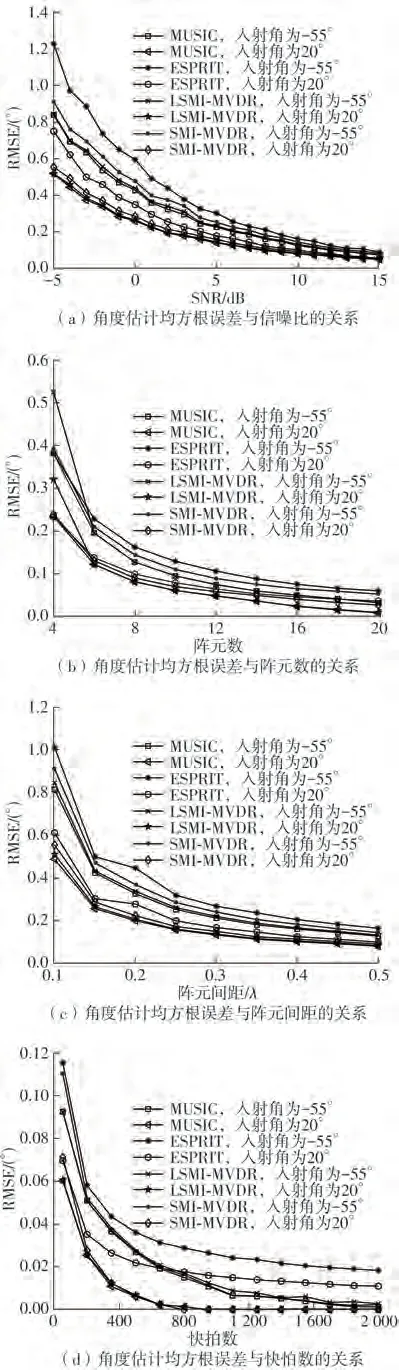
图7 频域DOA估计结果Fig.7 Frequency domain DOA estimation results
从图7(b)可知,随着阵元数的增加,所提及算法的误差均得到了改善。然而,运算量和硬件成本的增加所付出的代价是昂贵的,实际中可在定位精度的期望和成本之间折中考虑。
当阵元间距超过半波长时,会出现空间混叠,表现为栅瓣现象。从图7(c)可以看出,阵元间距在半波长附近误差较小。从图7(d)可以看出,在采样频率一定的情况下,增加快拍数相当于扩展了数据长度,间接增强了信噪比,能获得较好的定位效果。
自20世纪以来,麦克风阵列的硬件水平和信号处理能力得到了飞速发展,国内外研究人员也逐渐将麦克风阵列用于无人机探测。潘祺凰[63]设计了四元平面矩形阵,通过GCC和几何定位法实现了低空无人机的定位,理论上最远探测距离为300 m。由于在低信噪比下运用广义互相关得到的时延误差太大,黄强[64]结合了最大似然(ML)和相位变换(PHAT)权函数改进了TDOA 的时延估计效率,并研究了立体七元阵列结构,给出了近距离悬停无人机在阵元间距和采样频率影响下的DOA估计误差。冯仕轩[65]将改进的PHAT 权函数应用到九元十字阵中,在低信噪比下降低了DOA估计误差。随后,王学猛[66]通过融合梅尔倒谱系数和神经网络来识别无人机,采用TDOA成功定位了无人机,搭建了三元“L”型阵列实现定位并进行了误差分析。Sedunov等[67]在户外环境下,通过波束形成成功探测到低空无人机,最远探测距离可达294 m,并解决了移动源定位算法存在的差分多普勒效应引起的去相关问题。在低空无人机检测方法上,常先宇[68]利用压缩声谱图提取无人机噪声的特征向量,提出了一种基于贝叶斯的融合检测算法,提升了检测效率,并通过改进的TDOA定位方法成功定位出无人机,其中采用由8个阵元组成的双四面体阵列结构,最大定位相对误差为5%,最远定位距离为110 m。马春艺等[69]建立了复杂环境下用于检测微弱声源的非参数模型,提高了无人机的检测效率。Sedunov等[70]研究出的无人机声学探测系统(DADS)最远可探测中小型无人机260 m。Dumitrescu等[71]结合机器学习,在户外搭建了30元体积阵,最远可实现380 m 的无人机追踪。Kartashov 等[72]在城市环境下,搭建了12元平面阵,最远可探测100 m内的低空无人机。
时延估计定位技术的计算量小,实时性好,随着设备采样率的提升,时延估计精度得到一定的提高。因此目前定位无人机的方法大多采用TDOA法。许多学者也提出了改进的MUSIC[73-74]和MVDR波束形成器法[75-76]。高分辨率谱估计法虽然能够突破瑞利限,但其对空间谱峰搜索的计算量与搜索间距成反比,在无人机飞行过程很难得到稳定的采样信号,难以获得准确目标的DOA 信息。波束形成器法受其扫描机制的影响,其计算量也远高于TDOA法。上述无人机声学定位系统汇总见表2。

表2 现有无人机声学探测方案Table 2 Existing UAV acoustic detection schemes
本文对各类声学定位方法进行了综述,分析了各个算法的优缺点,并综合比对了各类算法在无人机声学定位场景下的性能差异。
首先分析了无人机噪声的频谱特点,剖析了时域和频域DOA 估计理论对无人机进行声学定位的可行性。一方面,在时域方法中列举了各类TDOA的时延求取算法,进行了理论推导,并分析了现有时延估计方法存在的问题;
另一方面,本文还对频域方法的原理进行了阐述,在不同参数下进行了详尽的比较。最后给出了当前无人机声学定位系统的发展现状,发现国内外高校大多定位方法采取时域TDOA 法,平面阵应用广,而频域法应用较少。然而,时域和频域各类方法的原理不同,各有优缺点。如时域TDOA 法运算速度快,但对于多目标和干扰场景下的检测效果不理想。频域DOA 法虽然可以解决多目标定位问题,但大多数算法基于远场窄带假设,且要求信源是不相干的,然而在实际中信号大多数是宽带非平稳的,此时巨大的计算量会不可避免地降低定位的实时性。上述方法尚不能完全解决实际场景下无人机的远距离定位问题,需深入研究。目前亟待解决的问题包括:
(1)声学阵列接收到的无人机辐射噪声的信噪比较低,无人机旋翼噪声常淹没于背景噪声中,因此低信噪比下无人机的宽带噪声快速定位值得探索;
(2)无人机旋翼噪声具有强烈的谐波特性,如何充分利用无人机旋翼的谐波信号进行定位和识别,需要进行系统的研究;
(3)无人机的辐射噪声特性、声传播特性、周边背景噪声特性以及阵列特性都会随着频率而变化,因此,综合各种因素,寻找无人机噪声的最优探测频段,非常值得研究;
(4)无人机噪声频率较低,一般采用大孔径阵列进行定位,但大孔径阵列携带不便,难以实用化,因此如何利用小孔径阵列对无人机噪声进行定位,相关的研究还较少;
(5)无人机具有机动性强、噪声低的特性,单节点的定位性能可能无法满足高精度的定位要求,因此,如何使用多个传感器阵列,构建传感器阵列网络对无人机进行协同探测和定位,需要深入研究。
猜你喜欢 窄带波束时延 基于共形超表面的波束聚焦研究成都信息工程大学学报(2021年6期)2021-02-125G承载网部署满足uRLLC业务时延要求的研究通信电源技术(2020年8期)2020-07-21超波束技术在岸基光纤阵中的应用舰船科学技术(2020年3期)2020-04-22毫米波大规模阵列天线波束扫描研究*通信技术(2019年3期)2019-05-31热轧窄带钢Q345B微合金化生产实践山东冶金(2019年1期)2019-03-30基于GCC-nearest时延估计的室内声源定位电子制作(2019年23期)2019-02-23基于FPGA的窄带DDC时分复用技术的研究实现电子制作(2017年20期)2017-04-26无线通信中频线路窄带临界调试法及其应用电子制作(2017年19期)2017-02-02FRFT在水声信道时延频移联合估计中的应用系统工程与电子技术(2016年7期)2016-08-21简化的基于时延线性拟合的宽带测向算法现代防御技术(2016年1期)2016-06-01推荐访问:无人机 声学 综述推荐文章
- 2018年江西赣州市医疗急救中心招聘编外人员公告:赣州市医疗急救中心
- 升学宴策划活动方案|2018升学宴活动方案
- 小学六一游园活动总结 [小学六一游园活动策划]
- 2018年中国工商银行广东分行暑期实习生招聘岗位、报名时间:2018中国工商银行广西分行春招
- 澳洲留学八大名校排名申请条件_澳洲留学奖学金申请条件及时间
- [调工商档案介绍信范文] 工商档案查询介绍信
- 加拿大亲属移民政策最新更新|加拿大亲属移民条件
- 初一下册语文练习册答案人教版2018 2018人教版语文练习册答案
- 贵州贵阳房价2018 2018年贵州贵阳中医学院第二附属医院招聘方案
- 【2018广东省湛江市赤坎区审计局招聘公告】2018湛江市赤坎区教师招聘