高速公路连续下坡路段货车追尾风险评价研究
来源:优秀文章 发布时间:2023-03-10 点击:
邹海云,刘 锴,张 驰,马如鹏,王 博
(1. 四川乐西高速公路有限责任公司,四川 成都 610000;
2.长安大学 公路学院,陕西 西安 710064;
3. 湖南省交通规划勘察设计院有限公司,湖南 长沙 410200)
近年来,中国提出并实行了“交通强国”战略,在中国西南、西北地区大力建设高速公路,以适应国家经济发展的需要,但由于中国西部地区的地形与地质特点,高速公路需在较短距离上克服较大高差时,往往只能选择采用较低的设计指标,使得高速公路出现较多连续下坡路段。据相关统计调查[1-2],我国高速公路连续下坡路段事故频发,在事故形态中,追尾碰撞事故占有较高的比例,同时,其后果也最为严重。而连续下坡路段对大型货车的行车安全较不利,更易导致追尾事故的发生,故而提高高速公路连续下坡路段货车行驶的安全性,降低其追尾事故风险,减少我国交通事故损失与伤亡的需求是急迫的。
对于车辆追尾事故机理及其风险模型的研究方面,可以归纳为4类:(1)对基于风险影响因素的分析:2017年,丁乃侃等[3]首次定义并界定直接和间接的追尾风险感知,并以结构方程模型探索多因素与风险的关系。2016年,刘鑫鑫[4]利用实测追尾事故数据,分别构建了追尾事故严重程度概率预测模型和追尾事故严重程度预测模型。2007年,赵杨东[5]在追尾事故的特点分析和类别界定基础上,引入高速公路追尾事故危险度的概念,提出了高速公路尾随事故和撞静止车辆危险度计算模型。2019年,Junjie Zhang等[6]探讨了驾驶行为异质性对追尾碰撞的影响,设计了模拟试验来评估跟车行为的异质性对追尾事故风险的影响。(2)基于速度理论的追尾风险评价模型:2011年,陆斯文等[7]分析了高速公路追尾事故的机理特征,以后随车辆减速度临界值作为风险评价指标,计算得出了用追尾概率和能量损失来表征的追尾事故风险。(3)从空间角度建立追尾风险模型:2010年,史海燕[8]建立了安全车距的计算模型,分析了各种因素对车辆发生追尾事故的影响。2009年,刘晓阳[9]探讨了追尾碰撞事故机理和诱发因素及其相关性,推导出了安全车距的计算模型,在此基础上建立各因素对车辆发生追尾概率的关系。(4)从时间角度来研究追尾风险:2021年,袁守利[10]考虑影响驾驶员反应时间的不同因素,建立了分等级的碰撞预警模型。2001年,Michiel M.Minderhoud等[11]将碰撞时间TTC(Time-to-collision,TTC)概念引入道路交通安全分析,介绍了两个新的安全指标来计算总体安全指标值。2018年,王佳丽[12]选取TTC作为风险替代指标,建立了大雾天气下的追尾事故风险传播模型。该方面的研究从多个角度切入,为高速公路连续下坡货车追尾风险的研究提供了众多可以借鉴的模型。
总而言之,高速公路追尾事故及风险研究中,主要从影响因素、速度、空间、时间4个角度中提取得到指标,再结合道路上车辆行车的不确定性,进一步得到汽车追尾事故风险模型。总结以上两方面研究可以发现,现有的汽车追尾事故风险研究中缺乏针对连续下坡货车追尾风险的研究。为此,本研究提出以CDR(碰撞减速率)作为车辆追尾风险指标,建立一种基于实测车头时距与速度数据的连续下坡路段货车追尾概率风险模型,希望针对性地对连续下坡路段货车的追尾事故风险做出分析,有益于山区高速公路追尾事故风险的研究。
当货车载重行驶于长大下坡时,由于长时间的下坡行驶,速度有不断增大的趋势,为了保证安全,驾驶员不得不频繁采取制动措施以限制车速,此种状态持续时间较长的话,将会使车辆制动性能明显下降,最终可能导致刹车失灵而引发车辆失控,载重货车惯性较大,难以进行方向控制,随着失控后速度的增加,会导致载重货车无法与正常行驶的前车保持安全的行车距离,最终发生追尾事故。而追尾事故可按参与车辆的多少及其车辆类型进行分类,本研究针对大型车辆两车追尾事故进行研究,对于大型车辆的多车碰撞,由于其过程与致因复杂多样,本研究暂不做研究。
西部某高速公路交通特管区位于平均纵坡大于3%的36 km长下坡范围,有追尾事故多发、货车车型比例较高的特点,且该特管区内实行严格的分车道分车型限速措施,管内路段实行客、货车分道行驶,左侧为客车道(限速60~80 km/h),右侧为货车道(限速60~70 km/h),使得后车无法实行超车行为,只能在单一车道上保持跟随前车行驶的状态,此时后车处于一种非自由行驶状态。有研究表明[13],当车头时距较大时,由于两车距离较远,前导车驾驶行为不对后随车辆的行驶产生影响,此时辆车处于自由驾驶状态,而非跟驰状态,车辆发生追尾事故的可能性小并且与速度和车头时距的相关性不强。对于车辆跟驰状态的判断目前研究的结论不一,部分研究得出的结论是当车头时距小于或等于5 s时车辆处于跟驰状态[14];
而在进一步的研究中发现[15],车头时距小于1.6 s时,车辆处于强跟驰状态,车头时距1.6~2.6 s属于状态过度区间,当车头时距大于2.6 s之间时,车辆处于弱跟驰状态,如图1所示。
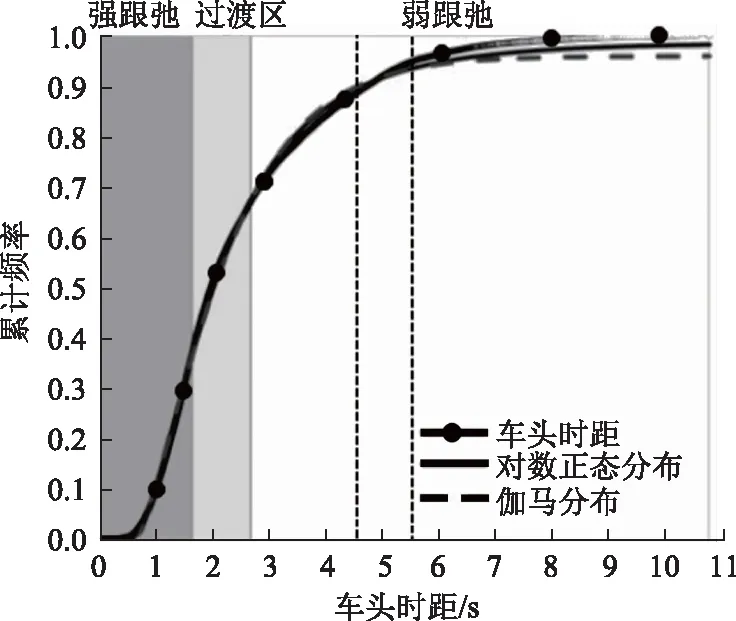
图1 车头时距分布函数
从安全角度考虑,当车辆在单一车道上排队行驶时,后随车辆只能在该车道上保持跟随前车行驶的状态,无法实行超车行为,使得跟驰车辆的安全运行与其车速和车距关联性较大,当车辆的车速条件与车距条件均被破坏时,前后辆车速差较大,车距较近,有较大发生追尾事故的可能性。而高速公路各路段上,行驶车辆的速度与间距往往具有复杂性与不确定性,其影响着不利事件——追尾事故发生可能性的大小,这符合风险问题的研究特点[16],可以用通过风险分析来进行研究。
本研究研究连续下坡路段货车的追尾事故风险,结合风险分析的基本原理,将此风险定义为在连续下坡路段发生两车追尾事故的可能性大小;
结合安全跟车行驶的速度条件及间距条件的研究,确定以两车的速度以及后随车的车头时距作为风险影响因素,通过对两个风险影响因素分析、处理及组合,研究其不确定性,进行具体情景(连续下坡路段货车追尾事故)、不确定意义下风险的量化分析。
试验地点选择西部某高速公路的交通特管区,其主要原因有两点:(1)该特管区位于平均纵坡为2.96%的长下坡(该全长51 km)范围内,特管区路段全长36 km,由于连续下坡距离较长且平均纵坡较大,且位于山区,行车环境较为复杂,事故发生频繁,属于追尾事故的易发路段,与本研究的事故类型相契合。(2)受所在的高速公路交通功能影响,该特管区路段下行方向的各年货车车型占比均在40%~60%,且研究路段通车时间长(2012年通车),在该特管区所处的长下坡所发生的事故中,其中货车交通事故占总事故数38.58%(2012年4月—2017年8月),这为大量采集货车的过车及事故样本数据提供了便利。
2.1 数据来源
2.1.1 高清卡口系统
高清卡口系统运用视频检测方式,通过抓拍高清图片来识别车辆行驶轨迹,并对车辆行驶轨迹进行记录,保存在服务器数据库中;
然后在视频中通过照片的形式显示车辆的通过时间、行驶速度、行驶方向、车牌号码、地点等信息,为道路安全管理方法的研究与实施提供支持[17]。
2.1.2 测点信息
据不完全事故信息统计,2013—2018年西部某高速公路36 km长下坡范围内,在事故多发点安装了4处高清卡口系统,4处高清卡口附近的百万车公里事故率为0.775 5 次/(百万车·km),而长下坡全范围内的百万车公里事故率为0.359 4 次/(百万车·km),前者百万车公里事故率为后者的两倍以上,可见该公路交通特管区范围为该处连续下坡事故多发路段。
采用的数据为2020年2月23日—2020年3月22日期间该交通特管区内4处高清卡口的过车数据(共78 219组),测点桩号分别为K2084,K2088,K2110,K2114,具体布置信息见表1,过车数据的时间及空间分布情况见图2。
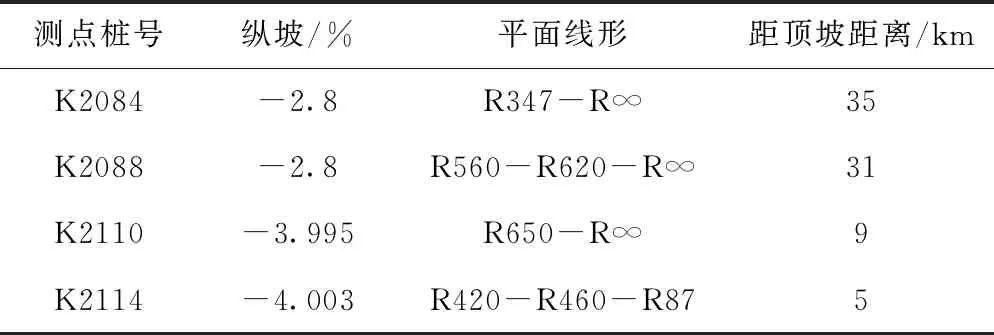
表1 高清卡口测点位置信息
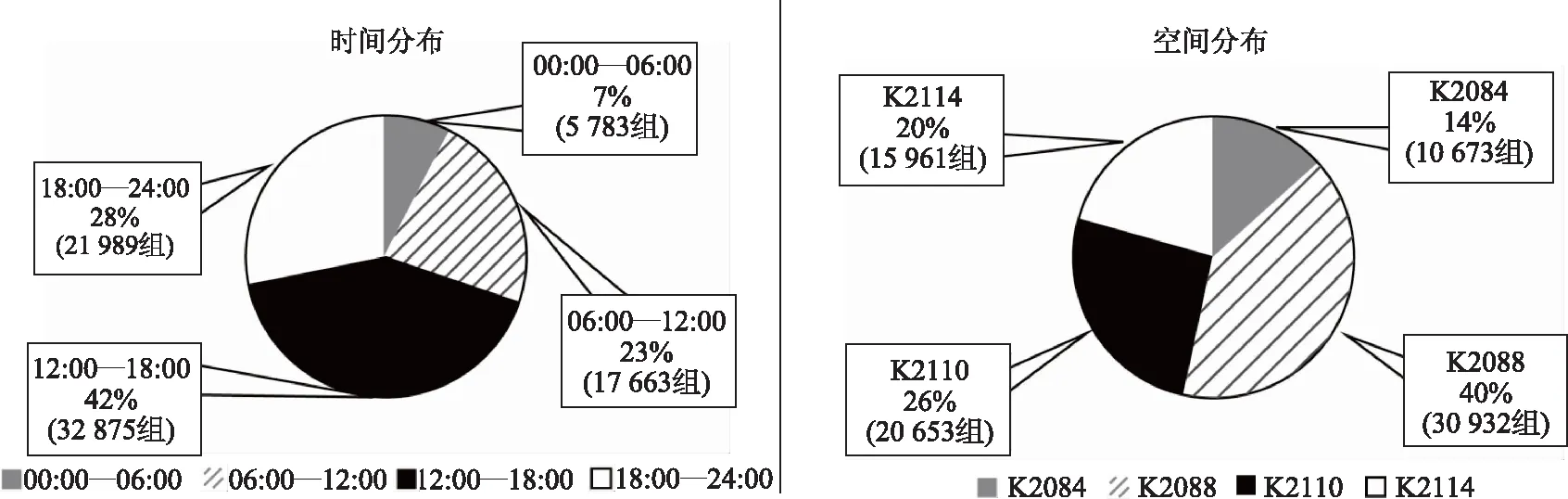
图2 测点过车数据的时间及空间分布
2.2 数据分析与风险指标描述
2.2.1 数据分析
本研究通过4个高清卡口测点的过车数据,共收集了78 219组包括货车速度、经过时间、车牌号及车辆类型等信息的有效数据,过车数据的具体时空分布情况如图3所示。

图3 过车数据的具体时空分布情况
本研究对由南向北下坡路段大货车的速度以及通过时间进行了分析处理,结合特管区连续下坡车辆追尾风险分析,考虑其速度破坏条件及间距条件,选取大货车的速度及车头时距作为追尾风险的影响因素,并对其进行了筛选,过程如下:
由于该交通特管区实行严格的分车道分车型行车管理措施,货车驾驶员们普遍采取了较慢的行驶速度,在对速度数据进行分析之后发现,4个测点的总体速度分布情况较为一致,各个时间段的分布情况变化不大,速度处于40~70 km/h的速度数据的平均占比为96.47%。而对于车头时距数据,当车头时距较大时,由于两车距离较远,后随车辆处于自由驾驶状态,而非跟驰状态,车辆发生追尾事故的可能性小并且与速度和车头时距的相关性不强。对于车辆跟驰状态的判断目前研究的结论不一,部分研究得出的结论是当车头时距小于或等于5 s时车辆处于跟驰状态[14]。综上所述,本研究对处理所得到数据的筛选条件为:(1)车辆速度在40~70 km/h之间;
(2)车头时距小于或等于5 s。并以筛选出的车辆速度及车头时距数据为基础进行连续下坡货车追尾概率风险指标的定义及模型的建立。
2.2.2 风险指标描述
结合上述追尾事故风险分析,通过分析及筛选得到的速度以及车头时距数据及每辆车经过测点时的行驶车速,定义风险分析指标——碰撞减速率CDR(Collision Deceleration Rate,CDR)。
CDR表示了前后车辆在一个车头时距的时间间隔内(假设一车做均速运动,另一车做匀变速运动),后车加速(或前车减速)使两车达到相等速度所需要的平均加速度,其值越大,后车(或前车)所采取的加速(或制动)操作空间就越大,对驾驶员来说操作空间越大,故而追尾事故风险越小;
反之,追尾事故风险越大。针对长大下坡路段大货车惯性大,方向控制较困难,保证安全运行状态主要靠控制车速与车距的特点,CDR能综合考虑前后车辆车速条件及间距条件的不确定性,相对准确地描述跟驰状态下车辆在某时刻的追尾风险,故而选取CDR作为连续下坡路段货车追尾风险分析指标,其计算如式(1)所示:
(1)
式中,CDR为碰撞减速率;
ΔVi为前后车速差;
THi为前后车车头时距。
在CDR指标的计算中,当ΔVi<0时(后车速度小于前车速度),两车间距在逐渐变大,后车没有逼近前车的趋势,因此本研究只选取ΔVi>0的CDR数据,观测CDR样本个数分布信息如下:263(K2084),2 228(K2088),225(K2110),851(K2114)。
3.1 CDR阈值的确定
CDR表示前后车辆在一个车头时距的时间间隔内(假设一车做均速运动,另一车做匀变速运动),后车加速(或前车减速)使两车达到相等速度所需要的平均加速度,不同的阈值代表的危险性也不一样,故而需要先确定CDR的阈值。
分别采用正态分布、对数正态分布、威布尔分布对CDR数据的频率分布直方图进行拟合,得到各个假定分布下的分布拟合曲线,如图4所示,拟合数据结果如表2所示。当拟合优度参数R2值越接近于1时,说明原数据所假定分布的拟合效果越好。通过累计比例关系图P-P图(图5)进行了拟合效果的对比分析,P-P图是根据变量的累积比例与指定分布的累积比例之间的关系所绘制的图形。通过P-P图可以检验数据是否符合指定的分布。当数据符合指定分布时,P-P图中各点近似呈一条直线。分析结果如下:
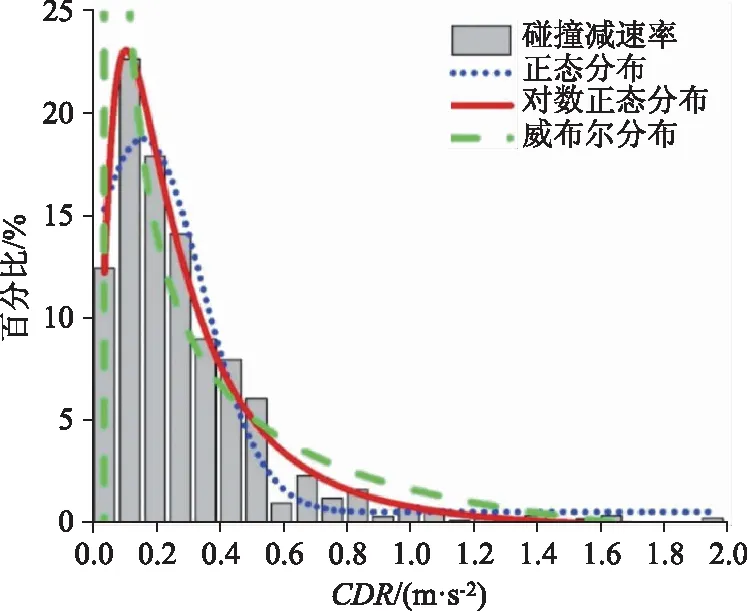
图4 CDR直方图与拟合分布

图5 3种分布的P-P图分析结果
(1)在图4中可以看到3种分布的拟合曲线对于条形的CDR数据的拟合程度均较好,正态分布的拟合曲线对于样本数据的拟合优度为0.944 61(拟合优度计算结果见表2),该拟合曲线在CDR>0.3 m/s2时曲线与样本频率直方图拟合程度较高,但当0 m/s2
对数正态分布的拟合曲线对于样本数据的拟合优度为0.985 51,曲线整体拟合效果良好, 拟合曲线的峰值处与样本数据峰值偏差小(约为0.45%)。
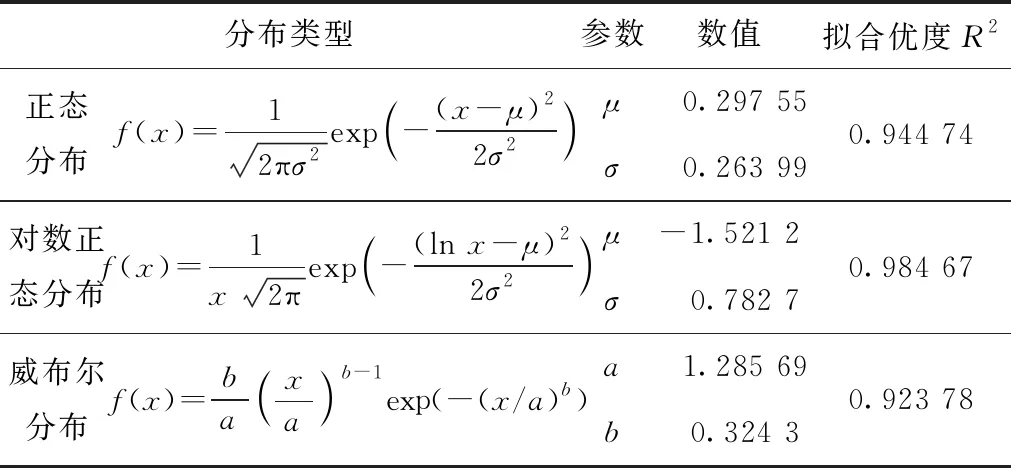
表2 CDR数据拟合参数
(2)从P-P图(图5)可以看出,对于正态分布,图中各点不成一条直线,说明CDR数据并不符合该分布;
而对于对数正态分布以及威布尔分布,它们的图中各点均近似呈一条直线,说明CDR数据对两种分布的符合性均较高。
(3)基于以上亮点的分析,对数正态分布的拟合效果最好,所以本研究将CDR的概率分布确定为对数正态分布,其均值μ与标准差σ分别为-1.521 2,0.782 7,并根据拟合的对数正态分布,选取85%分位值作为追尾事故风险的CDR阈值(记为CDR85),其值为0.491 6 m/s2并定义大于该阈值的CDR为危险CDR样本,危险CDR样本总个数为518。
3.2 基于CDR的追尾事故风险模型
以危险CDR为基础,参考碰撞潜力指数(CPI),有研究[18]表明,采用碰撞潜力指数公式(CPI)来计算后车的避免碰撞减速率(DRAC)超过最大可用减速率(MADR)的概率,能较好地识别出碰撞与非碰撞情况,且具有较高的识别精度,故而以危险CDR为基础,参考碰撞潜力指数(CPI)公式,提出连续下坡货车追尾事故的概率风险模型,其计算如式(2)所示:
(2)
式中,PT为所取时间段T内的概率风险;
T为所取时间段长度(T=N×Δt);
N为时间段个数;
Pr(CDRi(t)>CDR85)为t=i时Δt内大于CDR85的CDR样本频率。
该概率风险可以反映在连续下坡路段车辆发生追尾事故的可能性。概率风险越大,说明所取时段内,路段上逼近趋势较强的连续两车占比越大,则发生追尾事故的可能性就越大,反之则越小。
将基于CDR的追尾事故模型应用于试验所处的交通特管区连续下坡路段,结合所得货车CDR数据得出该连续下坡路段的货车追尾事故概率风险,并对结果进行显著性分析,最后以路段内事故数据对风险分析结果进行了验证。
4.1 追尾事故风险计算
根据式(2)计算得到连续下坡路段货车追尾事故概率风险,结果见表3。
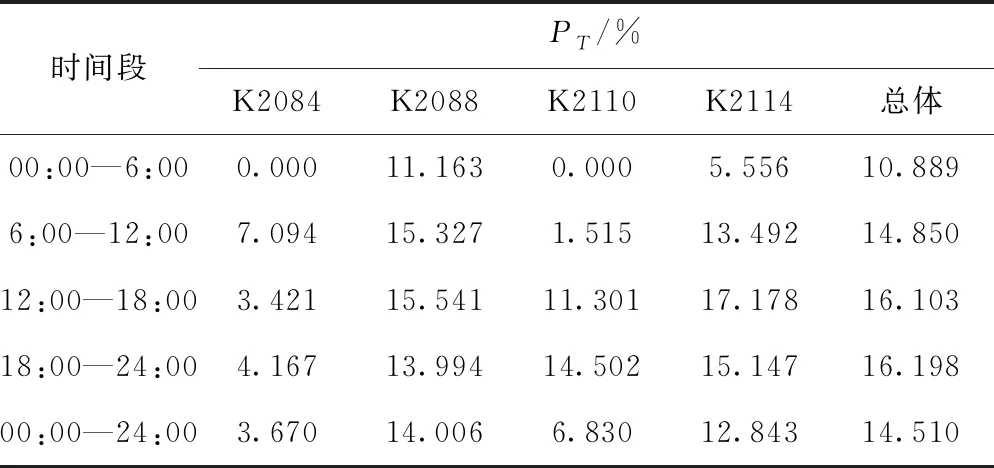
表3 追尾事故概率风险计算结果
4.2 追尾事故风险分析
追尾风险计算结果由图6所示。从图中可以看出测点K2088与K2114的追尾概率风险整体上大于其他两测点;
18:00—24:00时间段的追尾概率风险整体上最高。本研究利用单因素ANOVA分析了4个高清卡口测点及4个时间段的概率风险是否存在差异性,结果见表4及表5。
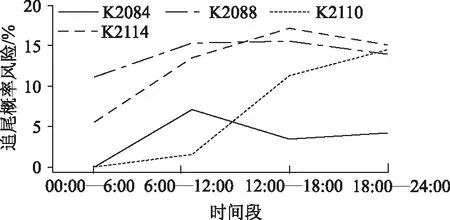
图6 追尾风险计算结果
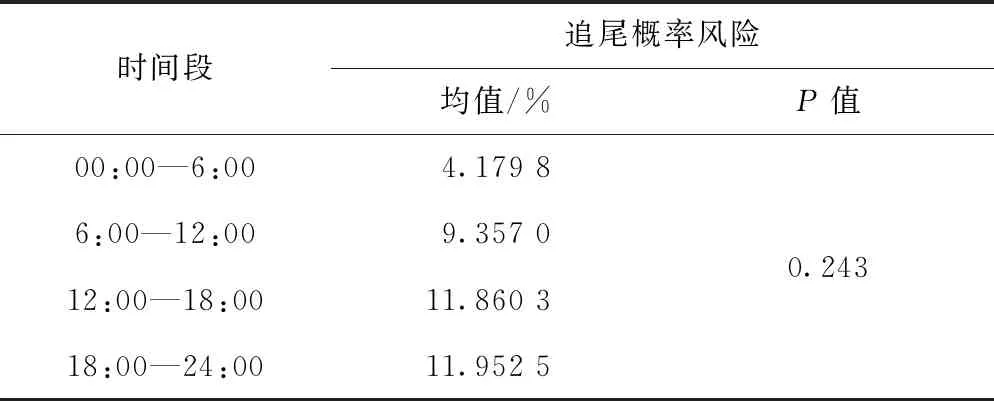
表4 不同时间段的追尾风险ANOVA结果
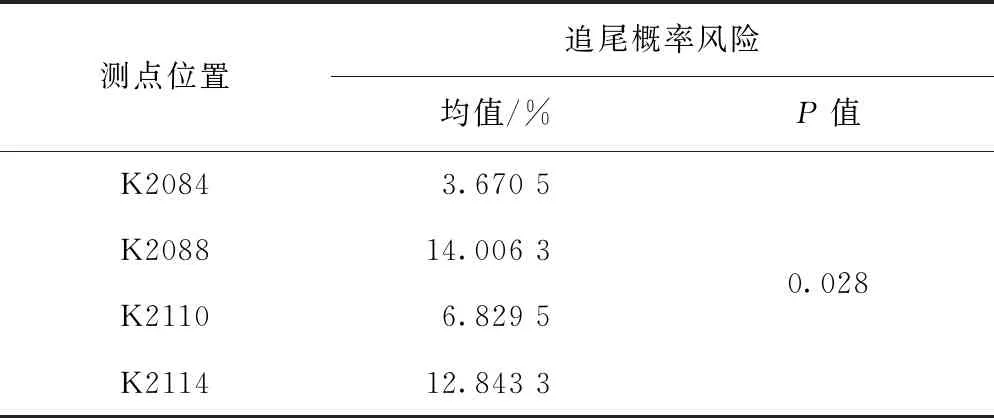
表5 不同测点的追尾风险ANOVA结果
由表4可知,12:00—18:00,18:00—24:00两时间段的概率风险均值相当,且较高,可以认为在12:00—18:00,18:00—24:00时间段内发生事故的可能性更大,但并不能说明12:00—18:00,18:00—24:00 时间段的追尾风险更高。由单因素ANOVA结果可知,各个时间段下的追尾概率风险均值在显著性水平0.05下没有显著性差异(P=0.243),及各时间段下的概率风险没有明显差异,说明4个时间段的追尾风险水平相同。
由表5可知,K2088,K2114的概率风险明显高于K2084,K2110,说明在测点K2088,K2114上发生追尾事故的可能性更大。由单因素ANOVA结果可知,各测点的追尾概率风险均值在显著性水平0.05下有显著性差异(P=0.028),K2088,K2114具有较高的追尾风险水平。
4.3 追尾事故风险结果验证
为了验证模型计算结果的有效性,采用2013—2018年高清卡口附近追尾事故数据对其进行验证。将计算所得的追尾概率风险均值与各测点附近1 km的百万车事故率进行对比验证,由计算所得各测点附近1 km 的百万车事故率分别为0.528 8 次/(百万车·km),0.951 8 次/(百万车·km),0.564 0 次/(百万车·km),1.057 5 次/(百万车·km),对比结果如图7所示。
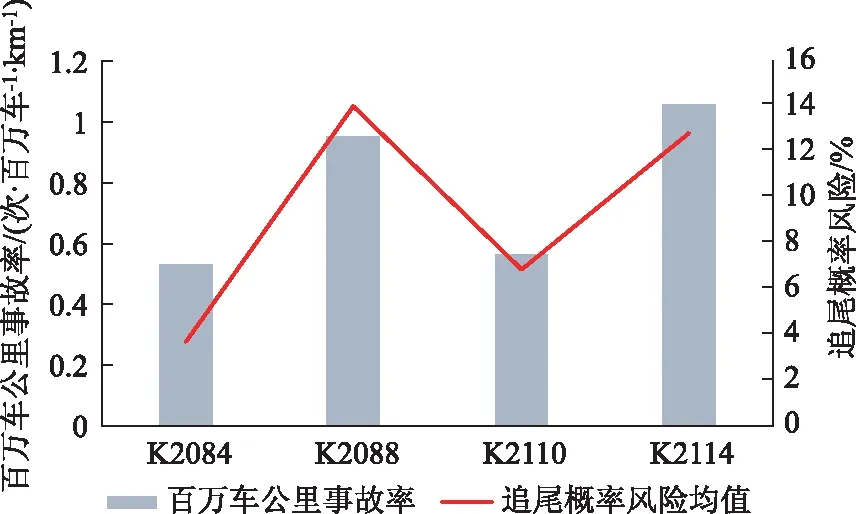
图7 事故率与概率风险对比
由图7可以看出,测点的追尾概率风险均值与其附近百万车公里事故率的变化趋势基本相符,下面从变化趋势一致性对各测点事故率与概率风险均值进行数据验证,采用皮尔逊相关系数来评估事故率与概率风险均值数据的变化趋势是否一致,其计算如式(3)所示:
(3)
式中,X,Y分别代表随机变量,这里为事故率与概率风险均值;
Cov(X,Y)为变量X,Y的协方差;
Var[X],Var[Y]分别为随机变量X,Y的方差。
最终计算结果事故率数据与概率风险数据相关系数r(X,Y)=94.5%,为强相关,即事故率数据与概率风险数据的变化趋势一致性强。
货车在连续下坡上行驶时,由于其惯性较大,刹车距离较长,容易引起追尾事故的发生,并且货车追尾事故造成的伤亡与财产损失比普通汽车追尾事故更为严重。本研究利用西部某高速公路交通特管区长下坡路段的高清卡口所记录的大量行车数据(23 205组),通过速差与车头时距计算得到碰撞减速率CDR数据,对高速公路连续下坡路段货车追尾事故风险进行研究,得到以下结论:
(1)西部某高速公路交通特管区长下坡路段货车CDR样本服从对数正态分布,得到85%分位值作为危险CDR阈值为0.491 6 m/s2。
(2)计算得到各时间段下的追尾概率风险均值分别为4.18%(00:00—06:00),9.36%(06:00—12:00,11.86%(12:00—18:00),11.95%(18:00—24:00),但单因素ANOVA分析结果显示,各个时间段下的追尾概率风险均值在显著性水平0.05下没有显著性差异。
(3)计算得到各测点的追尾概率风险均值分别为3.67%(K2084),14.01%(K2088),6.83%(K2110),12.84%(K2114),并且单因素ANOVA分析结果显示,各测点的追尾概率风险在显著性水平0.05下有显著性差异。
(4)通过皮尔逊相关系数,以各测点附近的百万车公里事故率对本研究模型进行有效性检验,计算得到事故率数据与概率风险数据相关系数r(X,Y)=94.5%,为强相关,即事故率数据与概率风险数据的变化趋势一致性强。
本研究在分析连续下坡路段货车追尾风险的基础上,针对跟驰状态下大货车的运行特性,选取CDR作为追尾风险指标,采用实测数据,分析具体路段的货车追尾事故风险,分析了该路段上各测点及各个时间段下的货车追尾概率风险,对比风险与实际事故数据,验证了本研究提出的连续下坡路段追尾事故风险模型,可为该路段交通安全管理或交通安全设施的设计提供参考,本研究方法也适用于高速公路中其他路段的行车风险研究。
同时,在模型验证中,虽然基于CDR的连续下坡路段货车追尾事故风险评价结论与该路段的实际事故数据具有相同的变化趋势,但由于采用数据存在部分欠缺,目前应用CDR展开风险评价存在一定的缺陷,在今后的研究中应采用更多测点来进行数据收集,并可对风险模型的可移植性进行研究。
猜你喜欢 下坡路时距货车 山区高速公路连续下坡路段安全分析及处治措施研究建材发展导向(2022年24期)2022-12-22趣味性进度提示设计对时距知觉的影响人类工效学(2021年5期)2022-01-15学习障碍学生与普通学生短时距估计的比较绥化学院学报(2019年10期)2019-10-12下坡路散文诗世界(2019年10期)2019-09-10INTERBIKE停办是行业的下坡路还是线上渠道的绝杀?中国自行车(2018年12期)2019-01-29智能OBU在货车ETC上的应用中国交通信息化(2018年12期)2018-03-21回溯式时距估计的计时机制*心理科学进展(2018年8期)2018-02-21货车也便捷之ETC新时代!——看高速公路货车ETC如何实现中国交通信息化(2017年8期)2017-06-06推货车里的爱学与玩(2017年6期)2017-02-16治超新规实施在即 深究货车非法改装乱象专用汽车(2016年9期)2016-03-01推荐访问:追尾 下坡 路段