无人机不同航线规划方案下露天矿山三维建模对比研究
来源:优秀文章 发布时间:2023-04-08 点击:
张艳博 路恒骁 梁 鹏 姚旭龙 李 群 于光远 李 华
(1.华北理工大学矿业工程学院,河北 唐山 063210;2.河北省矿山绿色智能开采技术创新中心,河北 唐山 063210;3.河北钢铁集团滦县司家营铁矿有限公司,河北 唐山 063701)
露天矿山边坡地形落差较大、环境复杂,在矿山生产作业过程中常伴有滑坡、崩塌等灾害发生,严重影响了工作人员的生命安全以及矿山的生产效益[1]。对露天矿山滑坡、崩塌灾害进行快速精准定位,并对滑坡体和崩塌体的各特征要素信息进行安全、高效勘测,对于边坡灾害成因分析和灾害发展趋势预测具有重要意义[2]。
无人机摄影测量技术以其高效率、低成本、安全可靠的优势,被广泛应用于各类灾害监测中[3-5]。基于无人机摄影测量技术构建露天矿山三维模型,可以高效地获取滑坡体和崩塌体的各项特征信息,能够有效克服露天矿山中传统滑坡监测手段存在的影像获取时效性差、分辨率低、无法对边坡进行长期监测的不足[6-8]。露天矿山三维模型精度影响边坡灾害监测效果,然而不同的无人机航线规划方案直接影响了露天矿山三维建模精度,因此无人机航线规划是进行露天矿山无人机摄影测量的重点工作[9-10]。
目前,无人机摄影测量作业常采用的航线规划方案为定高“之”字航线和定高“井”字航线[11-13]。然而对于大型露天矿山区域,采用传统的定高航线飞行方案存在的不足在于:首先由于露天矿山地形落差较大,飞行高度受到限制,会增加无人机撞到矿山边坡的风险;其次由于露天矿山地形起伏较大,无人机相对实际地面的高度不同,造成地面分辨率相差较大,从而影响建模精度[14-15]。仿地飞行是指无人机在作业过程中,飞机航高随地形起伏不断变换,并始终与三维地形保持恒定的高差。本研究以河北省唐山市司家营露天矿山为试验区域,利用大疆精灵4 RTK无人机,采用仿地“之”字航线规划方案,结合传统定高“之”字航线和定高“井”字航线规划方案,对3种不同航线规划方案获得的矿山三维模型进行对比分析。
1.1 研究区概况
研究区位于河北省滦州市境内的司家营露天矿山,矿山边坡地形落差较大,地势险峻。矿体赋存于单斜构造中,东帮顺倾,西帮反倾,近年来发生了多处不同规模的滑坡、崩塌事故,边坡稳定性问题严重。矿山最大高差可达250 m,矿坑南北长6 km,东西长2 km,研究区具体位置如图1所示。

图1 唐山市研究区所处位置Fig.1 Location of the study area in Tangshan City
1.2 技术路线
为了获取高精度的露天矿山三维模型,结合研究区复杂的地形、自然环境,首先制定了定高“之”字航线、“井”字航线和仿地“之”字航线3种航线规划方案;其次使用大疆精灵4RTK四旋翼无人机获取露天矿山影像数据,通过数据处理获取露天矿山三维模型;进而在三维模型上获取地面检测点坐标与GNSS RTK获取的地面检测点坐标信息进行对比;最后通过三维模型的完整性和地面检测点测量误差对3种航线规划方案进行定性、定量分析。本研究技术路线如图2所示。

图2 技术路线Fig.2 Technical route
2.1 无人机航线设计
2.1.1 定高“之”字和“井”字航线设计
定高“之”字航线整体呈“之”字形,航线位于测区正上方固定高度处,航线布设方案较为简单,工作量小,可以短时间获取测区影像数据。设置镜头倾角为-60°,航向重叠度为80%,旁向重叠度为60%,航高为120 m,实现矿山影像数据的获取,该航线能极大地减少数据冗余问题。定高“之”字航线规划方案如图3(a)所示。定高“井”字航线是以“之”字航线为基础,通过水平和垂直两个航线垂直叠加,构成“井”字航线。设置镜头倾角为-60°,航向重叠度为80%,旁向重叠度为60%,航高为120 m,镜头位置平行于主航线,通过单镜头相机获取多方位的矿山影像数据。定高“井”字航线规划方案如图3(b)所示。

图3 两种无人机航线设计Fig.3 Design of the two routes of UAV
2.1.2 仿地“之”字航线设计
借助仿地飞行功能,无人机能够适应不同的地形,根据测区地形自动生成变高航线,保持地面分辨率一致,从而获得更好的数据效果。仿地航线如图4所示。

图4 无人机仿地航线示意Fig.4 Schematic of the imitation ground route of UAV
采用基于DSM信息设计仿地飞行航线方案,使无人机始终与地面保持固定高度,来获取露天矿山影像数据并建立矿山三维模型。为获得矿区DSM信息,首先对矿区进行快速预扫飞行。为防止无人机飞行过程中误撞矿山边坡,选择矿区海拔最高点为起飞点,设置航高150 m,按照正射航线规划进行飞行。获取影像数据后经过内业处理生成DSM。
目前,无人机倾斜摄影测量处理最常用的软件为Pix4Dmapper和Smart 3D,这两款软件均能生成DSM,相较于Smart3D,Pix4Dmapper软件效率更高。因此,本研究采用Pix4Dmapper软件按照1 m的分辨率生成DSM文件用作仿地飞行底图,构建的数字表面模型(DSM)如图5所示。在此基础上设置仿地航线方案,镜头倾角为-60°,航向重叠度为80%,旁向重叠度为60%,航高为120 m。

图5 研究区DSMFig.5 DSM for the mining area
2.2 数据采集
选用大疆精灵4 RTK无人机(图6)进行数据采集,该型无人机集成全新RTK模块,具有更强大的抗磁干扰能力与精准定位能力,同时携带1英寸2 000万像素CMOS传感器,可以捕捉高清影像。

图6 大疆精灵4RTK无人机Fig.6 DJI Phantom 4 RTK
使用DJ GS RTK航线规划软件可以实现定高“之”字航线和“井”字航线的规划。本研究选择矿山最高处平台为起飞点,因矿山范围较大,综合考虑作业时长和作业精度设置相对起飞点固定高度120 m的航高,进而进行影像数据采集。规划设计仿地“之”字航线时,首先在矿区内采用2D正射方法快速采集数据,但对于地形落差较大的区域,首次飞行时要特别注意安全问题,尽量选择地形高处为起飞点,设置安全航高,保证无人机能够安全作业;然后利用Pix4D等空三软件,将2D正射方法采集的数据生成矿山DSM,并将DSM两个文件(tif和tfw)导入遥控器中;最后根据DSM生成仿地“之”字航线,设置仿地飞行高度120 m,相机倾角-60°,航向重叠度为80%,旁向重叠度为60%。
因大疆精灵4 RTK无人机自带RTK模块,因而选择免像控方案获取露天矿山影像数据。但是由于原始的POS信息中的高程信息为椭球高(即大地高),而所需要的成果坐标系的高程系统为正常高。对于整个参考椭球来说,不同区域的高程异常是不同的。但是,对于局部范围来说,其高程异常往往只有不到毫米级的变化,所以本研究布设1个控制点来获取高程改正值,对原始模型施加高程改正值获取模型正确的三维坐标。为了进一步验证不同航线规划方案下露天矿山三维模型的精度,在布设地面控制点的同时布设了15个地面检测点,地面检测点布设如图7所示。

图7 地面检测点布设Fig.7 Layout of the ground points
采用GNSS RTK对地面检测点进行测量,获取地面检测点在CGCS2000坐标系下的三维坐标,结果见表1。在无人机低空航测所建露天矿山三维模型上对检测点进行测量,获取其三维坐标信息,并与GNSS RTK获取的检测点三维坐标信息进行对比,从而分析所构建的露天矿山三维模型的精度。

表1 地面检测点CGCS2000坐标系坐标Table 1 Coordinates of the ground detection points in CGCS2000 coordinate system m
3.1 三维模型完整性分析
针对不同航线规划方案获取的露天矿山三维模型,分别从整体和局部两方面对模型纹理细节和变形程度进行对比分析。不同航线规划方案下的露天矿山三维模型如图8所示。整体而言,不同航线规划方案获取的露天矿山三维模型均较为完整,并未出现空洞现象,能较好地重现露天矿山。就地面分辨率(GSD)而言,定高航线GSD在露天矿山最高处为3.33 cm,在露天矿山最低处为9.53 cm。而仿地航线可以实现任何区域的地面分辨率为3.33 cm。就整体的纹理细节而言,基于仿地“之”字航线获取的模型,其露天矿山边坡细节更加明显,边坡轮廓更为明显。对于岩层,色彩效果更加明显,更能轻易、快速地通过目视判读进行识别。

图8 矿山整体三维模型Fig.8 Overall 3D models of the mine
如图9所示的模型局部而言,对于地面工作车辆和岩体细节可明显看出,定高“之”字航线和“井”字航线下的三维模型,地面信息模糊、工作车辆发生明显变形。采用仿地“之”字航线,地面细节信息,且地面工作车辆并未出现明显变形,边坡岩体细节明显更为凸出。

图9 矿山局部三维模型Fig.9 Local 3D models of the mine
边坡岩体细节如图10所示。采用定高“之”字航线,边坡岩体细节较差,岩体上凸出部分出现明显平滑、变形现象;采用定高“井”字航线,边坡岩体细节优于定高“之”字航线,但也存在明显的平滑、变形现象;采用仿地“之”字航线,边坡岩体细节明显,优于定高“井”字和定高“之”字航线规划方案,变形情况大幅度减少,能有效识别出边坡凸出岩体。
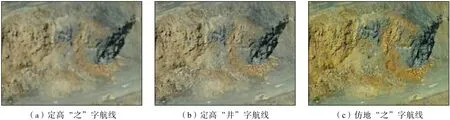
图10 矿山边坡岩体三维模型Fig.10 3D models of slope rock mass of the mine
3.2 三维模型精度分析
采用GNSS RTK对露天矿山东帮处布设的15个地面检测点进行测量,获取了各点位的三维坐标。在露天矿山三维模型上对检测点进行量取,进而与GNSS RTK实际测量坐标进行对比,从而分析三维矿山模型精度。目前,无人机航空摄影测量中广泛使用均方根误差(RMSE)进行航测成果精度评定,其主要是通过提前设置的地面检测点进行对比评估。具体而言,基于露天矿山三维模型,识别出各检测点并提取其三维坐标(x,y,z),并与GNSS RTK测量值(xRTK,yRTK,zRTK)进行对比,得到相应的均方根误差[16],相关计算公式为

式中,RMSEx、RMSEy、RMSEz为检测点的均方根误差;n为检测点数量;xi、yi、zi分别为检测点i(1≤i≤n)的模型测量值;xRTKi、yRTKi、zRTKi为检测点i(1≤i≤n)的坐标实测值。
航测成果全局的平面均方根误差(RMSEH)、高程均方根误差(RMSEV)和三维均方根误差(RMSE3D)可分别进行如下计算:

不同航线规划方案下检测点测量的均方根误差见表2。定高“之”字航线、定高“井”字航线和仿地“之”字航线规划方案对应的露天矿山三维模型的全局均方根误差分布如图11所示。

表2 检测点均方根误差Table 2 Root mean square errors of check pointsm
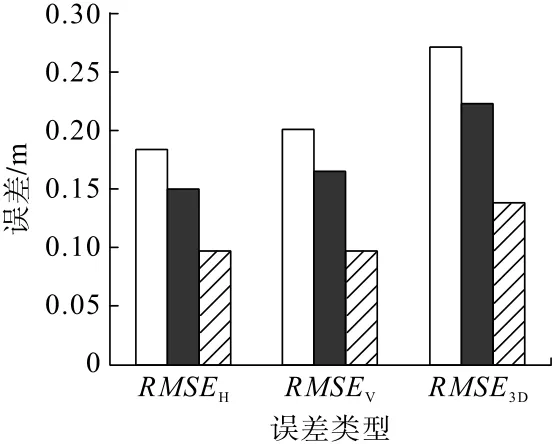
图11 全局均方根误差分布直方图Fig.11 Distribution histogram of the global root mean square error
由表2、图11可知,在全局平面均方根误差方面:定高“之”字航线(0.183 m)>定高“井”字航线(0.150 m)>仿地“之”字航线(0.097 m);在全局高程均方根误差方面:定高“之”字航线(0.201 m)>定高“井”字航线(0.165 m)>仿地“之”字航线(0.098 m);在全局三维均方根误差方面:定高“之”字航线(0.272 m)>定高“井”字航线(0.223 m)>仿地“之”字航线(0.138 m)。可见,定高“之”字航线规划方案获取的露天矿山三维模型误差最大、精度最低,仿地“之”字航线规划方案获取的露天矿山三维模型误差最小、精度最高。从全局三维精度来看,仿地“之”字航线所得矿山三维模型精度相对于定高“之”字航线提升了49%,相对定高“井”字航线提升了38%。因此可知,在地形起伏、落差较大的露天矿山区域,采用仿地“之”字航线规划方案进行无人机低空航测,可以获得精度更高的矿山三维模型。
无论是从三维模型的完整性方面还是精度方面分析,通过仿地“之”字航线获取的露天矿山三维模型,都比传统定高“之”字和“井”字航线获取的露天矿山三维模型质量更好、精度更高。需要指出的是,仿地飞行航线需要预先快速预扫,获取测区的基础地形高程信息,增加了一定的工作量。此外,由于露天矿山边坡台阶标高变化剧烈,需要无人机频繁进行飞行高度调整,仿地航线飞行导致航速较慢,可能影响作业效率。因此,在测量精度要求较高、而作业效率不作过高要求时,仿地航线是利用无人机进行矿山三维建模的最优方案。
本研究采用仿地“之”字飞行航线,结合传统定高“之”字航线和“井”字航线,获取不同航线规划方案下的露天矿山三维模型,并通过模型完整性及地面检测点的测量误差进行了对比分析。主要结论如下:
(1)基于无人机低空摄影测量技术,采用定高“之”字航线、“井”字航线及仿地“之”字航线规划方案均能获取露天矿山的完整三维模型,进而可以高效地获取露天矿山地形信息。
(2)在模型质量方面,采用仿地“之”字航线获得的露天矿山三维模型在纹理、细节、颜色和信息的丰富度方面,均优于定高“之”字和“井”字航线规划方案获取的矿山三维模型。在模型精度方面,通过地面检测点测量分析可知,仿地“之”字航线规划方案获取矿山模型的全局均方根误差最低、精度最高。
(3)在测量精度要求较高、而作业效率不作过高要求时,相比于传统定高“之”字航线和“井”字航线,仿地航线是在地形起伏、落差较大的露天矿山区域进行无人机三维建模的最优航线规划方案。
猜你喜欢检测点方根露天矿核酸检测点上,有最可爱的平江人现代苏州(2022年9期)2022-05-26骑马做核酸文萃报·周五版(2022年9期)2022-03-11备战铁矿露天矿与挂帮矿同时开采稳定性研究有色金属(矿山部分)(2021年4期)2021-08-30露天矿山土石方量的测量及计算电子乐园·上旬刊(2021年8期)2021-05-16我们爱把马鲛鱼叫鰆鯃飞天(2019年6期)2019-07-08飞行器FPGA检测点优化设置方法计算机测量与控制(2017年6期)2017-07-01均方根嵌入式容积粒子PHD 多目标跟踪方法自动化学报(2017年2期)2017-04-04基于Delphi-TOPSIS法的露天矿采区接续方案优选中国煤炭(2016年9期)2016-06-15河北将对1881个露天矿山开展环境治理河北地质(2016年1期)2016-03-20江西省绿色通道车辆货物检测点布点方案探讨中国交通信息化(2015年12期)2015-06-06推荐访问:无人机 建模 露天