基于双排传感器的转轴式自动循迹列车控制策略
来源:优秀文章 发布时间:2023-02-09 点击:
门永林,李士佩,臧铁刚
(1.中车南京浦镇车辆有限公司,江苏 南京 210016;
2.南京航空航天大学,江苏 南京 210016)
随着我国城镇化进程的加快及城市人口数量的增加,城市公共交通系统面临巨大的压力,经常出现交通拥堵现象,甚至一些大城市通过限制外部车辆或车辆限号来解决此类问题。城市交通系统主要包括轨道交通、公共汽车和个性化交通(包括出租车、专车和快车等)[1-2]。其中轨道交通能够承载大部分的交通压力,同时是城市居民出行的首选。
轨道交通广泛应用于全国各大城市,给城市交通带来极大的便利,但存在工程造价大、维护成本较高和灵活性差等缺点[3]。虽然公共汽车成本低且灵活性强,但是其承载量较低,不能有效解决城市交通的拥堵问题。科学技术与交通行业的融合推动了轨道交通行业技术的创新,不仅能够减少轨道交通的建设与运营成本,提高城市交通的安全性,同时可以实现交通系统的信息化与智能化。基于信息处理技术对路况信息进行分析处理,将列车轨道转换为虚拟轨道信息,结合列车的自动循迹理论实现列车的无轨循迹运动是突破传统轨道列车的关键技术,此外该技术可以有效地解决轨道交通系统中面临的诸多问题。
车载信息物理系统(CPS)和人工智能(AI)技术的快速发展,极大地促进了车辆自动循迹行驶的研究和开发[4-5]。复杂的交通环境要求车辆循迹行驶具有更高的安全性和准确性[6-7]。国内外学者对自动循迹理论做了大量的研究,并取得了一定的成果。袁希文等通过深度学习和数字虚拟轨道生成算法,对电车的道路轨迹进行了模拟分析,同时考虑了电车的延时性和非线性等特点[8]。明廷友提出了一种基于模型预测控制(MPC)的轨迹跟随控制方法,全面地分析了车辆纵向和侧向之间的相互影响,基于动力学理论建立了速度跟随控制模型,提高了车辆循迹运行的稳定性[9]。张琨通过分析汽车动力学模型在非线性区的失效问题和多种自主循迹纵向控制模型,提出了一种汽车自主循迹的多控制方法变换策略,针对车辆行驶的不同工况可选择合理的控制方法[10]。朱思敏基于PID控制和一次曲线圆滑打角的弯道控制策略实现了小车的循迹控制,通过激光传感器采集道路信息,速度传感器检测小车的行驶速度[11]。孙帮成等通过虚拟轨道列车各车间模块独立循迹和协同循迹控制方法实现了列车的循迹运动,增强了虚拟轨道循迹列车的灵活性,并对列车垂向运动特性的分析,提高了列车的舒适度[12]。韩鹏研究了有轨电车的可行路径,进一步基于可行路径对列车跟踪点在虚拟轨道上的循迹行驶进行协调控制,纠正了列车在循迹行驶过程中的偏差,实现了列车的循迹行驶控制[13]。HUANG J H等建立了一种列车虚拟车道保持运行的控制系统,能够使公共汽车按照虚拟轨道自动行驶,并采用冗余、多层故障检测和综合故障管理相结合的方法保证了循迹汽车的安全性[14]。HU C等研究了一种积分滑模控制的车辆行驶路径跟踪控制问题,路径跟踪控制被转换为偏航稳定问题,采用侧滑角补偿来减小稳态误差,然后根据偏航率参考值控制车辆进行循迹运动[15]。虽然诸多研究在车辆的循迹行驶方面取得了一定的成果,但是其关注的重点主要集中在车辆的转轮控制。此外,较少的研究考虑到车辆的承载能力及其灵活性。因此,对承载能力较强和灵活性高的转轴式列车循迹行驶的研究具有重要的意义。
虚拟轨道列车总控制系统可以分为上层规划决策系统和下层整车控制系统两个部分,如图1所示。

图1 控制系统结构规划图
上层规划决策系统以中央控制器为核心,借助红外线传感器、雷达和摄像头等设备来感知环境、轨迹识别和路径规划,并综合下层整车控制系统反馈的列车运行状态信息得到控制性能要求指令发送给下层。下层整车控制系统以电子控制单元(ECU)为核心,包括轮毂电机控制器、伺服液压转向系统控制器、制动系统控制器及附件控制系统等,根据上层控制指令和车辆当前状态信息来控制车辆的行为。下层整车控制系统功能如图2所示。

图2 下层控制系统功能
电子控制单元(ECU)根据上层控制发送的控制性能要求分别通过电机驱动器和液压推杆驱动器控制列车的速度和转向。电子控制单元同时将列车当前的运行状态信息实时反馈到中央控制器。
整个系统采用分布式控制,以整车的中央控制器为核心,通过CAN总线连接电子控制单元控制整车的运动状态。虚拟轨道列车控制系统结构拓扑如图3所示。

图3 虚拟轨道列车控制系统结构拓扑
上层规划决策系统发出的控制指令包括速度控制类(期望速度、期望加速度)、行驶转向控制类(期望转向角度)、原地转向控制类(原地转向速度、原地转向标志位)、轮毂电机启停控制类(电机启动、电机停止)、制动控制类(无制动、行车制动、驻车制动)以及附件控制类(灯光、喇叭使能等)。
虚拟轨道列车循迹控制系统由轨迹识别传感器、伺服液压转向控制器、伺服液压推杆和反馈元件等部件构成,其循迹控制系统结构如图4所示。

图4 列车总体控制流程图
系统工作过程中,中央控制器作为主控单元接收并处理路面信息、列车运动状态及轨迹信息后对列车驾驶方式进行判断。列车的驾驶方式分为非自动驾驶与自动驾驶。在非自动驾驶状态下列车由驾驶员操控,自动驾驶状态下则由计算机控制,驾驶员可通过操作控制面板或转向盘自由切换两种驾驶模式。在自动驾驶状态下,控制系统通过雷达、视觉传感器检测周围环境并判断列车是否可以安全驾驶。若道路环境存在安全隐患,则列车紧急制动并报警;
若列车可以安全行驶,首先判断列车是正向行驶还是反向行驶,然后控制列车循迹运动并实时将列车的运动状态和路面信息反馈到中央控制中心,使系统形成闭环控制。
虚拟轨道列车的循迹运动通过以下过程实现:中央控制器借助传感器扫描得到的运动轨迹与列车当前航向相比较后得到车轴角度偏转信号θ,该信号与角度传感器反馈的当前车轴实际转角信号进行比较,利用两者的差值Δθ,通过控制算法生成伺服液压推杆的指令信号,驱使伺服液压推杆带动轮轴实现转向运动,使列车能够实时跟随既定的轨迹行驶。在此过程中首先在地面上设定虚拟轨道,然后在转向轴中心处设置红外线传感器,实时测定当前曲线的切线方向角度β,如图5所示。控制器读取偏角数据β后,将数据反馈给循迹控制系统。最后控制器将转动轴转角数据换算成左右液压推杆的位移值,并输出给液压伺服系统,液压伺服系统控制液压推杆运动,使车轮转向。

图5 车转动轴中心在虚拟轨道上
列车在虚拟轨道的实际行驶过程中,可能因为对信息接收与处理的延迟而导致列车转向架偏离轨道的现象。如图6所示,若转向架转动轴中心偏离虚拟轨道,则传感器实时测定转动轴中心偏离轨道的距离D。控制器读取偏距D后,结合当前车速,计算出轮轴需要旋转的转角值,将转角值进行适当放大或缩小为β1。控制器将转动轴需要转动的转角数据换算成左、右液压推杆的位移值,并输出给液压伺服系统。液压伺服系统控制液压推杆运动,使转动轴中心能始终与虚拟轨道重合。
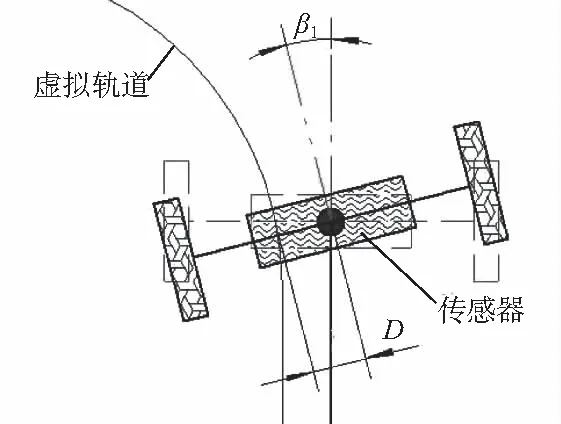
图6 车转动轴中心偏离虚拟轨道
3.1 转动轴位姿状态判定
根据列车转向架转动轴上传感器的分布特点,将传感器进行分组即分为前组传感器[a]和后组传感器[b],并对每组传感器赋予坐标值,如图7所示。

图7 传感器的布局及编号示意图
在列车行驶过程中,转动轴上的传感器对轨迹线进行实时检测,利用前组传感器坐标值为a的传感器和后组传感器坐标值为b的传感器检测轨迹线信号,可测得转动轴中心偏离轨迹线的距离d。根据传感器反馈的a值和b值将转向架转动轴中心位置及转动轴行驶方向划分为3种状态,如图8所示。

图8 位姿状态判定及分类情况示意图
3.2 循迹转向控制
虚拟轨道列车的循迹转向控制主要通过位姿交替控制法来实现。控制系统通过判断列车当前的位置误差和姿态误差对列车进行位置或姿态的调整。当位置误差较大时进行位置调节,以实现列车对给定路径的快速跟踪;
当位置误差较小时,对列车进行姿态的调整,以实现列车对路径追踪的准确性。两者根据误差的大小进行交替控制,完成虚拟轨道列车的循迹控制。列车转向架的转轴中心在偏离虚拟轨道中心线不同距离及转向轴行驶方向不同的情况下,控制器输出转角控制量不同,结合传感器检测到的轨迹线与行驶方向夹角θ以及输出控制量θ0,建立了如下控制规则。
a)如果d
3)当车辆处于状态③、状态④时,a-b>0,需要右微调控制转向架循迹。
b)如果D1
3)当车辆处于状态⑥时,a-b<0且|a|-|b|<0,需要右微调控制列车尽快行驶到微调带内;
4)当车辆处于状态⑤时,a-b<0且|a|-|b|>0,需要左转控制列车行驶到微调带内;
5)当车辆处于状态⑧时,a-b>0且|a|-|b|<0,需要左微调控制列车尽快行驶到微调带内;
6)当车辆处于状态⑦时,a-b>0且|a|-|b|>0,需要右转控制列车行驶到微调带内。
c)如果d>D2,即转向架整体偏离轨迹线过大,超出了控制范围,为了安全行驶,选择停车并检测故障。列车整体的循迹控制流程图如图9所示。

图9 整体的循迹控制流程图
3.3 传感器数据的处理及计算
在列车的行驶道路上虚拟轨道有一定的宽度,因此在传感器识别虚拟轨道时,需要考虑其宽度值。此外由于列车在行驶过程中分为3种不同的状态,将不同精度的传感器分布在传感器轴上,传感器与虚拟轨道的位置关系如图10所示。

图10 传感器检测轨迹线示意图
根据传感器的排布和由传感器检测到的虚拟轨道数据,将[a]组中检测到信号的传感器最小坐标表示为ai,对应实际坐标值为d(ai),最大坐标编号为aj,对应实际坐标值为d(aj);
[b]组中检测到信号的传感器最小坐标编号为bm,对应实际坐标值为d(bm),最大坐标编号为bn,对应实际坐标值为d(bn)。则[a]组传感器检测到的等效位置可表示为
(1)
[b]组传感器检测到的等效位置可表示为
(2)
根据[a]和[b]组传感器反馈的数据,转动轴中心偏离轨迹线距离为
(3)
根据[a]和[b]组传感器反馈的数据,列车转动轴的调整角度为
(4)
3.4 转向架调整
由于列车在实际的控制过程中,传感器周期性采集运行数据。根据采集到的离散数据,对循迹列车转向架采用基于反馈的PID控制算法[16],方法描述如下:
U(t)=Kpe(t)+Kif(t)+Kd(e(t)-e(t-1))
(5)
式中e(t)为在t时刻列车转向架实际转角和设定转角之间的偏差。
e(t)=eg(t)-ec(t)
(6)
式中:eg(t)为在t时刻列车转向架的设定转角;
ec(t)为在t时刻列车转向架的实际转角。
(7)
式中T为采样周期。为了减小误差,采用10个采样周期的平均值控制列车的调整精度。在实际的调整过程中需要多次实验才可确定最优值。
轨道交通与城市其他公共交通工具相比具有运载能力大、安全、高效和节约能源等特点。但是,轨道交通的建设成本较高,且对车站周边地区的地质产生不良影响。为此,本文基于列车转向架的结构,研究了列车转向架的循迹控制策略。首先将虚拟轨道列车的控制系统分为上层控制和下层控制。上层控制实时采集路况信息,对其数据进行处理分析,并将循迹控制指令发送给下层控制;
下层控制接收上层信息后,将控制指令发送给列车的各执行单元。其次,将虚拟轨道的列车传感器分为两排安装在转向架的转动轴上,并根据控制精度选择检测范围不同的传感器。基于虚拟轨道的宽度和传感器的分布,建立了转向架与虚拟轨道的相对位置模型。最后,根据列车在虚拟轨道上的相对位置,将循迹行驶列车分为3种不同的行驶状态,针对各行驶状态提出了相应的控制策略。采用基于PID控制方法,结合传感器实时反馈的离散数据实现了列车循迹行驶的控制和调整。