融合无人机影像与激光点云数据的三维建模研究★
来源:优秀文章 发布时间:2023-01-21 点击:
胡佳雯,邓 钟,张柯月
(闽江学院地理与海洋学院,福建 福州 350108)
无人机倾斜摄影测量方便快捷,目前已广泛用于地形、建筑三维建模,早在2015年,李卉[1]研究了无人机倾斜摄影测量应用于建筑物三维建模方法,曲林等[2]研究了无人机倾斜摄影数据的实景三维建模;
邱春霞等[3]研究了倾斜影像的三维模型构建与模型优化的问题;
符敏仪等[4]采用Smart3D 软件进行校园实景三维建模, 顾海锋[5]利用无人机倾斜摄影实现了江苏省泰州市的永安洲化工园三维精细建模,并对出现模型镂空、纹理扭曲等问题进行了修复。无人机倾斜摄影测量应用于建筑三维建模、地形建模、区域场景三维建模技术已经成熟,而在实际建模中,仍然存在模型镂空、建筑物外墙纹理扭曲、水面空洞等问题。常规地形制图对模型精度要求不高,一般不需要修补,而对于精细三维建筑建模和地形建模则不允许出现模型纹理拉花、空洞等问题,需要补测纹理、修补模型,而修补模型处理过程复杂、工作量较大,同时降低了模型精度。无人机搭载多镜头或单镜头多角度倾斜摄影可以提高三维建模精度,但对于复杂建筑物、密集建筑以及周围树木遮挡建筑仍然存在及建筑模型局部纹理拉花、镂空等现象。地面三维激光扫描技术可以快速获取物体表面三维密集点云数据,以及建筑纹理信息,可以快速重构建筑的三维模型、真实反映物体三维空间分布,完整描述建筑物的细部结构,弥补无人机空中摄影测量视角的不足,实现空中、地面全方位的三维立体摄影测量[6-10]。
本文将以闽江学院第四食堂为例,介绍无人机倾斜摄影测量与地面三维激光扫描点云数据融合三维建模的方法。
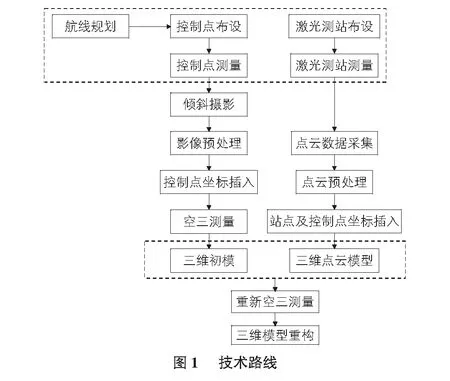
为了显现无人机倾斜摄影测量与地面三维激光点云数据融合建筑三维建模应用效果,本文选择建筑结构复杂、建筑密集、周边树木较多的闽江学院第四食堂作为研究对象。首先根据周边地物情况,确定无人机航拍范围,布设控制点,根据航拍范围规划无人机航线,根据通视情况布设地面激光扫描测站,采用GPS分别测量地面控制点坐标和激光测站点坐标。随后分别利用无人机采集倾斜影像数据,三维激光扫描仪采集点云数据。为了实现两者数据的精确融合,在数据处理过程中,插入共同的地面控制点坐标,根据控制点分别建立倾斜摄影三维初模和三维点云。最后根据共同控制点,融合激光点云数据和无人机影像数据,通过空三解算,重构三维模型。具体技术流程见图1。
3.1 倾斜摄影测量原理
倾斜摄影测量是通过飞行平台上搭载多台传感器,同时从垂直、倾斜等角度采集影像,获取地物顶部影像及立面纹理。其基本原理是以空中拍摄的中心投影影像为基础,通过光路关系转化为平行投影,其核心为共线方程。由像平面坐标系和像空间辅助坐标系间的数学关系,求解得的摄影测量基本共线方程[11-12]如下:
(1)
(2)
其中,x,y,f均为像平面中心点坐标及摄影机焦距;
X,Y,Z均为像片上任意一点在世界坐标系下的三维坐标;
XS,YS,ZS均为摄站坐标;
a1,b1,c1,a2,b2,c2,a3,b3,c3均为旋转矩阵参数。通过共线方程求解出像片的外方位元素,根据内外方位元素进行密集点云重建,并附加纹理贴图,实现实景模型的建立。
3.2 无人机倾斜影像数据采集
本次使用的无人机为DJ(大疆)精灵4-RTK,其相机使用1英寸CMOS图像传感器,可稳定拍摄高达2 000万像素的照片,影像传感器总像素2 048万,影像最大分辨率4 864×3 648(4∶3),5 472×3 648(3∶2)。
在测区范围内,围绕目标地物设置倾斜摄影飞行航线,并设置系列飞行参数,其中,设置相机角度45°,无人机航高100 m、飞行速度7 m/s,航向重叠度80%、旁向重叠度80%,设置完成即执行航摄任务,无人机自动完成航摄。在影像数据采集时,可根据需要调整无人机飞行高度以及摄像头拍摄角度,也可适时对兴趣区进行手动拍摄采集,采集一些隐藏部位的纹理信息。本次实验总采集影像数为67张,见图2。

3.3 地面三维激光扫描原理
三维激光点云扫描技术是使用三维激光扫描仪通过发射器发出激光脉冲信号,经由物体漫反射后,沿相反方向返回,传到接收器中,在特定的坐标系下获取并计算扫描仪及物体间的距离S,横向扫描角度α及纵向扫描角度β,从而得到点云的三维数据[13]。计算方法如下:
x=Scosβcosα
y=Scosβsinα
z=Ssinβ
(3)
3.4 地面三维激光扫描点云数据采集
选取合适的测区后,根据目标地物的形态及周边地物情况,设计空间位置及标靶球,该区域共设有测站数4站,并在测站与测站间设置相同位置的标靶球作为连接点。本次实验所使用的地面激光扫描仪为Z+F 5010c,其扫描区间0.3 m~187.3 m,扫描范围较广,在该次实验中每一测站的实际扫描距离为5 m~15 m,在进行建筑立面信息采集时,地面三维激光扫描仪对测区进行360°全景扫描,获取建筑外墙的密集的三维点云数据,包含角度信息、距离信息及反射率。受到环境及仪器架设限制,所采集到的数据缺少建筑顶部信息。为了满足点云在智能拼接上的需求,在相邻测站之间设置有一定的重合度,保证相邻测站间建立起连接。测量人员围绕闽江学院第四食堂所架设的测站点位分布见图3。

4.1 无人机倾斜摄影测量影像数据处理与三维建模
本次航摄共获取67张影像,在影像使用前,先使用Photoshop软件对无人机影像进行预处理,通过调整影像的亮度、饱和度、对比度等,使影像间明暗差异减小、提高匹配度,利用Context Capture三维建模软件导入影像共67张,实际投入使用66张,其中1张影像因与其他照片重叠度不高、较难提取连接点而无法用于重建。每个图像的关键点均值为39 448个,共14 869个连接点,每个影像均值为1 142个,重投影误差0.54个像素,符合重投影误差基本要求。
对影像进行预处理后,即可插入地方控制点对影像进行空中三角测量,提取、匹配并连接航拍影像中的特征点信息,并根据共线方程计算相机的外方位元素,即其拍摄瞬间的位置与姿态,最后,将所有影像信息纳入到统一的物方坐标系下,如图4所示。

完成空三解算后,生成三维模型。如图5,图6所示,受地面控制点精度和无人机航高等因素的影响,所采集到的建筑立面影像定位精度不高,一定程度上导致了建筑表面纹理不够平整,同时,又因为地物间相互遮挡等因素,导致模型局部纹理缺失,存在模型空洞及纹理扭曲现象。

4.2 融合建模
合理运用三维激光点云数据和光学影像数据所具有的优势,将地面三维激光扫描与倾斜摄影测量相结合,通过第三方控制点,将两者匹配至相同坐标系下,再进行空中三角测量和三维重建,从而减少模型的大量空洞扭曲等问题。将处理后的地面激光点云数据与无人机影像数据导入Context Capture三维建模软件中,在软件中进行空中三角解算,并导入控制点及测站点坐标用于激光点云数据与无人机影像数据的匹配与连接,运用采集所得的影像数据与点云数据,融合生成最终的高精度三维点云数据,在三维点云数据的基础上构建TIN三角网,并在三角网上进行贴膜处理即可获得最终的建模成果。最后建立融合无人机倾斜影像与地面三维激光点云数据的闽江学院第四食堂三维模型,见图7。

无人机倾斜影像从空中视角获取建筑纹理,地面激光点云数据从地面视角获取建筑物纹理数据,两种数据融合三维建模,实现建筑全方位三维建模,有效提高三维模型精度。
4.3 倾斜摄影模型与融合模型效果对比
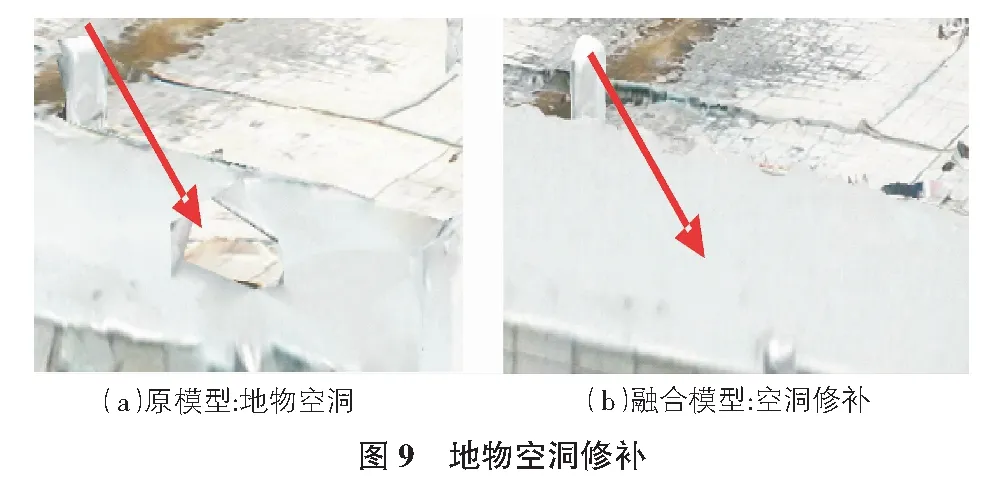
为了更清晰的展示融合模型与传统倾斜摄影模型在成果上的差异,将两者的三维模型图进行对比,见图8(a),图8(c)。倾斜摄影模型墙体具有明显的变形及扭曲,白模表面不平整,见图8(b),图8(d)。融合模型墙体的变形与扭曲等得到了修复,纹理清晰,白模较为规整,提高了纹理精度,见图9(a)。倾斜摄影模型墙体容易出现空洞,而图9(b)融合模型墙体空洞得到了修补。

本文以闽江学院第四食堂作为研究对象,开展无人机倾斜摄影影像数据与地面三维激光点云数据融合研究。结果表明:无人机倾斜摄影测量三维建模快速高效,精度较高适合较大范围三维建模,满足地形制图需求,但对于复杂结构建筑、建筑密集区域以及树木遮挡建筑,空中视角存在盲区,无法获取相关纹理,三维建模会出现空洞、局部纹理扭曲现象,难以满足精细三维建模需求,将无人机影像与三维激光点云数据结合既能够保证三维建模效率,又能够修正无人机单独建模所造成的地物扭曲、空洞等问题,优化纹理细节,可以满足三维精细建模需求。
猜你喜欢 纹理激光建模 基于FLUENT的下击暴流三维风场建模成都信息工程大学学报(2021年5期)2021-12-30《符号建模论》评介天津外国语大学学报(2021年1期)2021-03-29联想等效,拓展建模——以“带电小球在等效场中做圆周运动”为例中学生数理化(高中版.高考理化)(2020年11期)2020-12-14基于BM3D的复杂纹理区域图像去噪软件(2020年3期)2020-04-20求距求值方程建模初中生世界·九年级(2020年2期)2020-04-10肺纹理增多是病吗?保健与生活(2019年7期)2019-07-31激光熔覆专题文摘表面工程与再制造(2019年1期)2019-05-11TEXTURE ON TEXTURE质地上的纹理Coco薇(2017年8期)2017-08-03激光3D长绳儿童故事画报·发现号趣味百科(2016年3期)2016-06-24神奇的激光儿童故事画报·智力大王(2016年3期)2016-05-05推荐访问:无人机 建模 激光