涂装车间滑橇自动清洗方案
来源:优秀文章 发布时间:2023-01-21 点击:
王胜强 马荆亮
(机械工业第九设计研究院股份有限公司,长春130011)
滑橇是涂装车间进行车身转运的器具,分为底漆滑橇和面漆滑橇等。滑橇在使用时油漆不可避免会附着在上面,随着车身漆膜烘干,滑橇上面的油漆也被烘干固化,这会影响滑橇的导电性和洁净度,所以在多次喷涂使用后,滑橇需要进行清洗以满足使用性能。目前的清洗方法一般是人工使用高压清洗机进行清洗。高压清洗机生成的水流压力可以达到油漆材料的破坏强度和油漆与滑橇的附着强度,油漆材料会被高压水击碎以达到清洗的效果。
高压水清洗虽然能很好去除滑橇上面附着的油漆,但是在目前应用过程中遇到以下问题。
2.1 滑橇清洗间内水雾问题
高压清洗机一般产生的水流压力高于200 MPa,在清洗滑橇过程中,高压水流喷射到滑橇上会产生大量水雾,即使房间内换气次数达到90 次/h,水雾也不能及时排出,所以在清洗过程中能见度很低,这对人工的视野造成影响,清洗的准确性下降。
2.2 噪音问题
在清洗过程中,高压清洗泵和高压水流会产生较高噪音,噪音约120 dB,工人长期在高湿和高噪音环境内操作对身体健康会造成一定损害。同时噪音也会对滑橇清洗间周围的环境造成影响。
2.3 操作不便利
工人在使用高压清洗机时,由于水流压力过高必须需要佩戴防护服、防护面罩、防护鞋等防护装置,整套防护装置质量约20 kg,佩戴使用时工人行动不便利。滑橇的底部也需要清洗,目前常用的方法是利用电动葫芦和锁链把滑橇翻转,使滑橇底部朝上,然后清洗底部,操作繁琐且不安全。
2.4 清洗效率
由于环境和操作繁琐,人工进行滑橇清洗时效率不高,平均2~3 h 才能清洗1 台滑橇,在产量大的车间,这样的清洗效率不能满足生产要求。
3.1 系统基本条件
a.环境状况:环境温度15~45 ℃;
b.压缩空气质量要求:压力>0.4 MPa,露点≤-20 ℃(0.4 MPa),含油量≤0.01 mg/m3,颗粒大小≤0.5 μm,颗粒密度≤0.01 mg/m3;
c.电压:380 V,3 相 5 线;
频率:50 Hz;
d.机器人接地:电阻值<10 Ω,单独接地;
e.机械化定位误差≤15 mm。
3.2 系统主要组成部分
高压清洗系统主要组成设备:清洗机器人组件、高压清洗机系统、滑橇输送系统和高压清洗喷头4 部分组成(图1)。

图1 滑橇清洗间布局
清洗机器人组件包括机器人本体,控制柜和机器人底座。机器人安装底座之上,滑橇在底座下方运行(图2)。

图2 清洗机器人
3.3 系统信号连锁
机器人高压清洗系统各设备间需要具备信号连锁(图3),输送系统把待清洗滑橇运输到房间内设定位置后,会把到位信号发送给清洗机器人,清洗机器人接收到信号后,会控制高压清洗机启动,高压清洗启动完成且压力稳定后会反馈信号给清洗机器人,之后清洗机器人开始执行仿形轨迹,同时控制高压清洗喷头开启。由于机器人有效工作范围有限,本案例中需要清洗的滑橇长度约7 m 大于机器人工作范围,所以要进行分段清洗,首先滑橇停止在位置1(图4),清洗机器人完成这一部分的清洗工作后,滑橇输送系统再将滑橇转运至位置2(图5)。然后机器人再次启动完成剩余区域的清洗工作,清洗完成后滑橇会被转运上线。

图3 设备信号连锁

图4 滑橇停止位置1

图5 滑橇停止位置2
机器人高压清洗系统内配置下述设备:1 台FANUC R-2000iC/210WE 专用高压清洗机器人,机器人安装在框架上方。清洗机器人除了配备安全光栅、急停开关、门开关等安全设备,还包括机器人控制柜,系统控制台和带PW Ⅳ软件的电脑设备,控制柜安装在室体外且靠近室体易于观察的位置。同时配备1 套高压清洗喷头和1 台HAMMELMANN 高压清洗机。
4.1 清洗机器人组件
本案例采用FANUC R-2000iC/210WE 机器人(图6),机器人可负载210 kg,可达半径2 450 mm,重复定位精度±0.1 mm。同时机器人的高度柔性可以顺利的实现滑橇复杂结构的清洗。机身共包含六个轴,全部用不锈钢电机盖壳密封,保证了本体和电机的使用寿命,内置传感器检测气压,保证手臂内电气元件的安全,通过防水防尘试验,防护等级IP67,适用于高压清洗的恶劣环境。机器人控制柜采用的是FANUC R-30iB 控制柜,具备高性能、高可靠性、发热低等特点。机器人底座(图7)采用的是结构钢搭接成的龙门框架结构,框架外表面安装不锈钢罩壳避免其被水雾腐蚀。
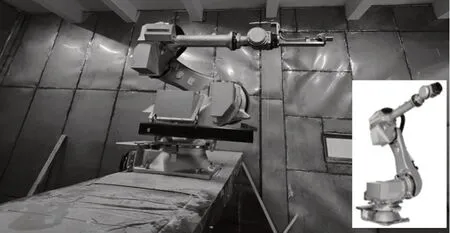
图6 R-2000iC/210WE机器人

图7 机器人底座框架
4.2 高压清洗机
高压清洗机(图8)包括高压泵、电机、电控装置等。高压清洗机关键参数:最大压力260 MPa,清洗时不小于160 MPa,流量为21 L/min,电机功率为110 kW,电机转速为1 500 r/min。关键单元高压泵采用哈莫尔曼HDP144。高压泵HDP144设计简洁,具有3 个柱塞,且有哈莫尔曼获专利的柱塞密封装置。特殊优势在于高压柱塞密封使磨损程度减少到最小,以便泵在高压的状态下长时间的工作。
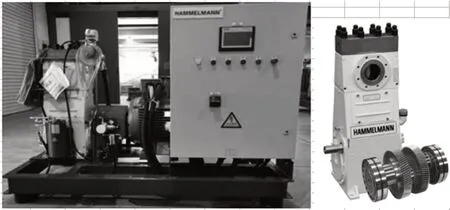
图8 高压清洗机和HDP144高压泵
4.3 高压清洗喷头
高压清洗喷头(图9)采用一款型号SC03 的德国进口品牌,其允许使用的压力范围是50~320 MPa,最大运行流量为50 L/min,直径为56 mm,渗漏量为0.2~0.6 L/min。最佳的内部流量引导结构设计,实现了更高的流量输出,充分利用了泵的全部能力,其可以实现低高速清洗转换,为清洗滑橇提供更多柔性设计,其能承受高压水反作用力的冲击,保证了系统的可靠性。

图9 高压清洗喷头
结合滑橇清洗的质量要求和批量生产的节拍要求,采用滑橇固定喷枪仿形的方式进行清洗,当待清洗滑橇进入清洗间停到设定位置后,清洗机器人开始执行仿形程序。不同滑橇调用不同程序进行,面漆滑橇注重上表面和侧面的清洗,清洗时高压水柱与滑橇表面需要成一定角度,避免机器人受到过多的反作用力。底漆滑橇的各个表面都需要进行清洗,尤其对底漆滑橇的支点和底部与电泳摆杆电极接触的部位需要进行重点清洗,用以恢复底漆滑橇的导电性。清洗机器人进行仿形示教时应注意喷枪与滑橇的距离不能过近,控制在10~15 cm 的距离。重点清洗的位置可以适当缩短距离和延长停留时间。仿形示教时还需注意机器人姿态需要合理,尽量避免某个电机轴处在极限位置的情况。清洗时使用的水为工业水,高压清洗机配备的水箱需要具备自动补水功能,清洗产生的废水中含有漆渣,需要通过滑橇清洗间底部积水坑中的潜水泵抽到污水处理站处理。每个滑橇清洗时间约50 min,根据滑橇种类和复杂程度不同清洗时间会有所差异。
目前滑橇自动清洗在涂装车间应用较少,自动清洗可以彻底解决人工清洗遇到的问题,而且提高了滑橇清洗的效率和质量。此外高压水自动清洗在其他零件清洗领域同样具有借鉴意义。随着涂装车间自动化、智能化的发展,滑橇自动清洗在未来必然具有广泛的应用。
猜你喜欢 控制柜清洗机底漆 汽车冲压生产线中板材清洗机的发展现状及应用锻压装备与制造技术(2022年2期)2022-05-11动力集中电动车组综合控制柜热分析计算交通科技与管理(2022年8期)2022-05-07浅析水性防锈底漆的施涂方法汽车维护与修理(2021年24期)2021-12-23自动浸蜡控制设备控制柜散热设计安徽电子信息职业技术学院学报(2021年1期)2021-03-16车身新板件的面漆前处理工艺分析汽车维护与修理(2020年10期)2020-06-09对流室炉管外壁清洗机设计与试验北京理工大学学报(2020年5期)2020-06-09汽车修补涂装工艺(二)汽车维护与修理(2018年8期)2018-08-07具有散热功能的PLC变频电机控制柜设计现代职业教育·中职中专(2018年7期)2018-05-14电泵井故障原因分析及对策实施科学与财富(2017年24期)2017-09-06龙门汽车自动清洗机PLC控制系统的设计科学与财富(2016年28期)2016-10-14推荐访问:涂装 车间 清洗