基于CFD⁃DEM的水下清淤机器人吸泥管道流场分析①
来源:优秀文章 发布时间:2022-12-10 点击:
余新鹏,胡 琼,吉成才,朱静妍
(1.中南大学 机电工程学院,湖南 长沙 410083;
2.长沙矿冶研究院有限责任公司 深海矿产资源开发利用国家重点实验室,湖南 长沙 410012)
近年来,随着水利事业蓬勃发展,我国建设了许多如黄河小浪底水库这样的以防洪减淤为主,兼顾供水、灌溉、发电、除害兴利的枢纽工程。这些项目在江河治理开发的总体布局中发挥着重要作用[1]。如今,广泛分布在我国各大流域的水库在运用过程中会遇到不可避免的泥沙淤积问题。以小浪底水库为例,至2016年10月,用沙量平衡法及断面法计算的库区淤积量分别达到了38.990亿吨和32.573亿立方米,达到了设计泥沙库容量的45%[2]。为解决泥沙淤积问题,提出了抓斗式、泵吸式、普通绞吸式、环保绞吸船等多种解决方案,它们大多依靠船载设备进行运转,在浅水、河道及宽阔的湖泊中具有较好的疏浚效果,但在深水及特定狭小空间则难以工作[3]。相比于湖泊和河道清淤,水库清淤具有坝前水深大、内部落差大的特点,且水库多建于内陆地区,有些并不具备通航条件,大型船只难以进入。
水下清淤机器人是集绞吸和淤泥输送功能于一体的自行式履带车,通过在岸的铠装缆绞车及综合控制室来进行清淤实时监测。设备具有高度模块化、无需现场组装、调试方便、体积较小、能适用于水下孔洞及其他各种深水清淤环境的特点。
由于泥浆属于固液二相流介质,机器设备在工作过程中泵功率与工况不匹配时容易发生泥沙沉降[4]、滑移[5]、旋转[6]、团聚[7]等现象,导致泥管堵塞。国内外已有诸多学者通过数值模拟和试验对管道输送进行了多方面的研究[8⁃10]。本文通过CFD⁃DEM方法来分析该设备不同工况下吸泥管内泥沙颗粒的流动和分布情况,为制定实际生产中的合理工作参数提供参考。
1.1 吸泥管流体模型
水下清淤机器人如图1所示。本文建立了3种不同吸泥管俯角的模型,如图2所示。其中俯角1为水下清淤机器人工作俯角的最小位置。吸泥管连接着绞吸头和泥浆泵,泥沙在绞吸头的作用下经入口进入管道,在泵的作用下进入泥沙收集池。

图1 水下清淤机器人实物图

图2 吸泥管不同俯角模型
1.2 泥沙颗粒模型
黄河小浪底水库2000~2016年累积淤积泥沙38.990亿吨,细沙(d≤0.025 mm)占比39.7%、中沙(0.025 mm<d≤0.05 mm)占比28.9%、粗沙(d>0.05 mm)占比31.4%。针对以上数据,根据加权平均算法求得本次数值模拟设置泥沙颗粒均值粒径为0.42 mm。
土质参数见表1[11]。对照表1可知,本次数值模拟的泥沙颗粒密度为2 700 kg/m3。

表1 土质参数表
1.3 网格划分与无关性验证
吸泥管计算域如图3所示,对计算域使用ICEM⁃CFD软件进行结构化网格划分。为提高数值模拟的精确性和收敛性,将网格由粗糙到精密分为5套不同

图3 流体域网格(单位:mm)
数量的网格,通过网格无关性验证后,最终选取网格数量为40 217的网格进行数值模拟。
1.4 CFD⁃DEM耦合模型
本文应用Eulerian⁃Lagrangian方法对泥浆进行固液二相流耦合。其本质是计算并跟踪离散相的颗粒在连续相流场中的相互作用力。本数值分析中采用Ansys Fluent与EDEM软件进行固液二相流耦合。在耦合计算中,CFD软件先通过设定好的N⁃S方程、湍流模型等流体计算公式求得每个划分流体域内的传递参数,之后将数据发送至EDEM软件;
EDEM软件通过传递过来的数据计算颗粒在流体域内的受力情况,之后再将结果返回,依次完成迭代。
连续性方程表述为:

式中ρ为流体密度;
t为时间;
vi为速度矢量在笛卡尔直角坐标系i方向的分量。
x方向的动量守恒方程为:

式中P为静压;
ρgi和Fi分别为某方向上的重力体积力和外部体积力;
τij为由流体运动引起的黏性应力张量。
y方向和z方向的动量守恒方程类同于式(2)。
选用κ⁃ε方程描述水相湍流,由于吸泥管为等直径物理模型,湍动能计算方法采用湍流强度I和水力直径D。

式中Re为雷诺数;
vl为液相流速;
μl为液相动力黏度。
1.5 曳力模型
泥沙中值粒径参数设置为0.42 mm,数值仿真中考虑泥沙颗粒体积分数,计算量会十分巨大。为了提高计算效率,在CFD⁃DEM耦合中运用wen⁃yu曳力模型将颗粒放大,可以达到提高计算效率且保持计算结果准确性的目的。
接口利用DPM模型计算颗粒在流体中所受的曳力,因此颗粒所受曳力的选择需要通过DPM模型中的Physical Models进行设置。Fluent中提供了多种曳力模型,因泥沙颗粒体积分数明显低于主相,选取wen⁃yu曳力模型,该模型适用于次相体积分数明显低于主相的稀疏相流动。
Scale⁃Up Factor的大小主要依据EDEM中所设置的大颗粒放大倍数n:

图4给出了颗粒放大倍数n对仿真模拟结果的影响。图4(a)为原始颗粒粒径仿真结果;
图4(b)为10倍颗粒粒径下的仿真结果,图4(c)为10倍颗粒粒径下设置放大倍数的仿真结果。图4(a)和(b)为不同颗粒粒径在弯管内的数值模拟结果。图4(b)中由于颗粒粗粒径的原因,其受重力沿下管壁发生明显沉降,受离心力作用在弯管段贴上壁运动,管内分布明显不均匀。图4(b)和(c)为同种颗粒粒径在弯管内的数值模拟结果,但图4(c)设置了放大倍数,其模拟结果与图4(a)几乎一致。

图4 颗粒放大效果对比
1.6 边界条件
连续相边界条件:吸泥管1号口为速度入口,2号口为压力出口;
颗粒相边界条件:吸泥管1号口为速度入口,2号口为压力出口。仿真过程中设置入口颗粒给入量为5 kg/s,出口压力为101 325 Pa。不同工况下的入口清水流量见表2。

表2 不同工况下的清水流量
2.1 不同俯角工况分析
图5分别展示了3种俯角下不同工况泥沙颗粒最小速度与仿真时间的关系。可以看出,伴随着泥泵功率增加,泥沙颗粒最小速度呈上升趋势。俯角1为水下清淤机器人工作俯角的最小位置,管道与水平面垂直度在3种工况中最大,泥沙颗粒受重力影响最大,入口处泥沙沿壁流动现象最小;
俯角2在前2种工况下均出现泥沙颗粒最小速度为0的情况,伴随着泥泵流量增加,颗粒堆积情况得到缓解;
俯角3与水平面垂直度最小,泥沙最小运动速度较为平稳。随着工作俯角减小,泥沙颗粒所受到的重力与管壁摩擦力的合力先增大后减小,致使俯角2时工况1、2均发生堵管现象。

图5 泥沙颗粒最小速度⁃时间关系图
2.2 泥沙颗粒堵塞分析
针对俯角2中泥沙颗粒出现堵塞的情况,对吸泥管道内颗粒群流动状态进行了分析,结果如图6所示。工况1和2时,泥浆在泥泵吸力作用下向管内流动;
由于受到了重力的影响,泥沙紧贴下壁面流动,在入口后逐渐产生堆积现象;
泥沙颗粒沿下管壁运动速度显著降低,工况1、2情况下均出现沿壁泥沙群速度为0的现象。工况3和4时,伴随着泥泵流量增加,泥浆动能增大,泥沙沿管壁速度增加,颗粒堆积情况得到缓解。工况5和6时,伴随着泥泵流量进一步增大,泥沙颗粒速度分布规律沿管道径向降低,受离心力的作用,颗粒经弯管处明显贴向上壁面。

图6 不同工况下吸泥管内颗粒群流动状态
不同工况下吸泥管内压力分布云图如图7所示。管道内受泥沙颗粒不均匀分布影响,不同位置的局部压力出现差异。伴随着泥泵流量提升,入口处压力有升高趋势,弯管内外弯处存在明显差压,内弯处形成负压,容易出现气蚀的现象。

图7 不同工况下吸泥管内压力分布云图
2.3 吸泥管二次流特性
二次流是管道泥浆输送中的一项关键指标[12⁃13]。吸泥管弯曲处泥浆在流动过程中受离心力作用产生二次流。为了研究其在吸泥管中对泥沙颗粒的影响,从弯管顶部重力势能最大处取得剖面(如图8所示)进行分析。俯角2时6种工况的二次流剖面如图9所示。
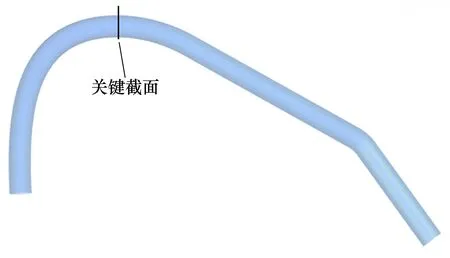
图8 吸泥管关键截面示意图
由图9可见,工况1已经发生堵管现象,二次流较为复杂。泥沙颗粒淤积在管道下侧阻碍了液相的流动,致使其与管壁发生冲击,并在管道对称的侧壁和下壁位置造成四处二次涡流。流线方向沿水平径向明显分为上下两层,下层受泥沙颗粒堆积的影响导致二次流迹线较为稀疏。工况2、3中管道底部依然存在颗粒堆积的情况,使得管道底部二次流迹线分布不均匀,颗粒淤积处出现空白的现象。受到竖直方向径向压强梯度的影响,吸泥管内二次流方向完全由顶部流向底部。工况4时伴随着泥泵功率增大,吸泥管内流体流速和流量得到进一步增加,泥沙颗粒堵塞情况得到缓解。液相受到离心力的影响,使得二次流方向贴向管壁,在这一过程中使得管道沿竖直方向径向对称处有产生涡流的趋势。工况5、6中,随着泥泵功率进一步增大,液相动能增加,使得二次涡流成型并得到强化。

图9 不同工况下吸泥管关键截面二次流迹线图
通过上述分析可知,泥浆进入弯管后,受到离心力和流体与泥沙颗粒、管壁的冲击影响,会产生截面上的二次流和涡流。可以看出,伴随着涡流的产生和强化,泥沙颗粒从吸泥管截面中心沿径向扩散发展。涡流的产生会加剧泥浆对管壁的磨损,导致动能损失,从而影响吸泥管道的输送效率。
1)水下清淤机器人在不同低功率俯角下,泥浆受重力和离心力的共同作用以及管壁产生碰撞引起能量损失,引发堵管趋势。
2)泥泵流量增加使吸泥管内泥沙颗粒分布更均匀。泥沙颗粒运动规律在水平管段分布服从重力原则,竖直管段伴随流量增大而向外侧壁增大,弯管段受离心力的作用会产生二次涡流。
3)泥浆流经弯管处所产生的二次涡流会加剧对管壁的磨损,导致动能损失,从而影响输送效率。
猜你喜欢 管壁清淤泥沙 泥沙做的父亲中学生天地(B版)(2022年4期)2022-05-17捷龙轮清淤工艺研究珠江水运(2022年7期)2022-05-12机制砂泥饼/长江航道清淤淤泥制备陶粒条件及性能探究建材发展导向(2022年6期)2022-04-18市政道路软基清淤回填施工技术实践与探讨建材发展导向(2021年19期)2021-12-06为什么大象洗完澡后爱往身上涂泥沙?小天使·三年级语数英综合(2021年8期)2021-08-16大唐鲁北厂2号炉壁温超限及措施的探讨科技创新与应用(2017年14期)2017-05-19电厂锅炉水冷管路泄漏的主要原因与相关措施科技与创新(2015年13期)2015-07-03国内外清淤机现状分析及其对策城市建设理论研究(2011年23期)2011-12-20海鸥和螺蛳中国青年(1955年4期)1955-08-16推荐访问:水下 机器人 管道推荐文章
- 大学生违规检讨书范文【三篇】:学生通用检讨书10000字
- 2018年农村青年入党申请书 2018农村青年入党申请书【五篇】
- 【小学二年级描写春天的作文500字】 小学二年级描写夏天的作文
- 安徽省宿州市埇桥区天气 安徽省宿州市埇桥区兴农供销集团有限责任公司招聘公告
- [河北省2018上半年教师资格考试面试成绩查询入口【已公布】]2018中级会计成绩查询
- 【2018上半年广东教师资格面试成绩查询入口【已公布】】2018中级会计成绩查询
- [上班早退检讨书]员工早退检讨书怎么写
- 江苏省中国科学院植物研究所2018专业技术岗招聘启事:中国科学院植物研究所
- 【2018年9月山东全国计算机等级考试网报时间:6月19日】2018年9月全国计算机等级考试
- [澳洲188C投资移民政策]投资移民加拿大条件