电动轮椅减震、智能变速及自动避障设计
来源:优秀文章 发布时间:2022-10-19 点击:
张泽江 柳青 谭想 王凯
摘 要:一方面,人口老龄化问题是当今社会一大问题,另一方面,因为各种事故而导致下肢残疾人数成千上万,他们丧失了行走能力,生活极为不便。为了给老龄人以及残障人士提供结构简单、稳定性好、操作简单的人性化代步工具,本文设计了一款新型电动轮椅,该产品具有省力、减震、智能变速及自动避障功能,极大的改善了这类人群的生活方式。
关键词:电动轮椅 减震 智能变速 自动避障
1.绪论
1.1研究背景
随着社会发展,人口数量增长速度变慢,中国正处于人口老年化社会迅速发展的阶段,另外我国残障人士也越来越多。老年人和残障人士的出行和生活面临着很大的困难。随着经济发展,国家医疗保健系统发展健全,人们对残障人士和老年人的关心也是与日俱增,老年人出行也逐渐成为一个需要关注的问题。
1.2产品现状
当前市面上轮椅种类也是各种各样,但是并不能满足所有老年人及残障人士的需求。随着科技不断发展、智能化不断普及,需要轮椅的智能化来帮助老年及残障人士来完成一系列需求。
中科院自动化研究所研究的智能轮椅是我国第一辆多功能智能轮椅,该轮椅采用嵌入式控制技术、多传感器信息融合技术和语音导航技术,使用户能够简便控制,为后续的轮椅研究方向提供了思路。
上海交通大学关于智能轮椅研发也取得了很大的成果。采用摄像头和激光雷达测距传感器采集轮椅周围环境信息,使轮椅有定位、导航、避障功能;通过触摸显示屏与用户进行人机交互,方便用户的指令下达。
本设计主要通过施加动力、减震机构、自动避障设计等对轮椅进行改造。
2.设计方案
2.1机械结构设计
本设计以常见轮椅作为基础框架,大众熟悉的结构能使老年残障人士更快的熟悉机械结构及各项功能的实现。
2.1.1动力部分设计
坐垫下部,为轮椅增加动力装置—蓄电池,选择的蓄电池体型较小,并且具有充足能源和强力续航能力。
2.1.2减震部分设计
首先在后轮中增加阻尼减震器,可以大大增加轮椅越野能力,适应各种路况的。
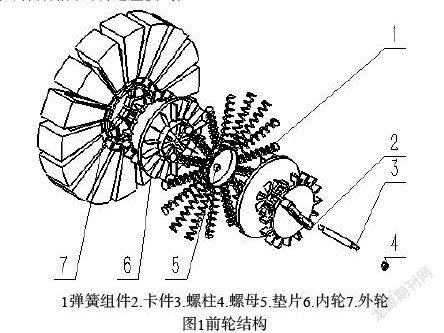
轮椅前轮设计原理:采用高强度耐磨树脂进行分叶片式设计,每个叶片单独内置弹簧,所有叶片安装后组合成一个圆型轮,在运行过程中各个叶片进行单独伸缩来适应各种路况从而使轮椅运行平稳,做到对各种路况的自适应模式。
前轮结构如图1,内轮6分成16个区,每个区可以安装一个弹簧,在内轮的内圈中设计了16个高度和深度都是1毫米的凸起和凹陷,方便固定内轮同时锁住弹簧,使弹簧只能做伸长或收缩运动。
外轮7由16个叶片组成,叶片与叶片径向之间留有缝隙,是为了能让这16个部分能有较大的运动空间。在每个叶片中间各开一个方槽,通过这个方槽实现内轮与外轮的连接并且使外轮的运动轨迹固定。
卡件2的凸起与外轮内圈方槽咬合,从而可以使外轮维持圆形,卡件可以带动外轮旋转,同时外轮可以沿径向在弹簧作用下移动。
2.2智能变速及自动避障设计
智能电动轮椅采用了压力传感器,通过计算,将避震器弹簧的压缩量与传感器上的压力大小相对应。在实践中测出电动轮椅正常行驶且路况良好时的压力值作为标准压力值。在电动轮椅行驶过程中,通过压力传感器将避震器的压缩量实时反馈给控制系统,与标准压力值做比较。将实时反馈量与标准压力值之间的误差,因检测过程中可能会出现干扰,致使压力传感器传回的数据包含噪音,所以在控制系统中加入了卡尔曼滤波利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计,采集稳定的数据。经过卡尔曼滤波器后得到的结果记作误差,若误差在给定周期内仅在无限趋近的附近轻微波动,则视当前路况良好,电机稳定输出;当检测到误差的值在给定的周期内波动剧烈时,则视当前路况不佳,此时,使用PID控制算法在理论上可以证明,对于过程控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制。
电机端的反电动势作为速度环的反馈信号采集,反馈值在单片机中做 PID 计算,根据计算结果,调整PWM的输出波形,输出当前指令速度的 PWM信号,使电机始终处于当前控制指令中的速度。在控制电机加减速的过程中,需要注意加减速曲线的平滑,否则会造成电机的控制不平稳,甚至造成设备的损坏。如果加减速曲线调节的足够光滑,电机速度的变化会非常稳定,不会使设备或者其他电机驱动的装置发生震颤。
PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活,将传感器上的压力值作为输入量,标准压力值作为目标量,将计算结果用于控制电机转速,同时设置PID计算的输出限幅,限制了电动轮椅的最大速度解决误操作问题,做到降低轮椅速度的同时,使电机的转速随路况而改变,由此,即保障的使用者的安全,有提高了轮椅的舒适性。
轮椅采用了激光雷达避障系统,可以扫描轮椅周围的障碍物,通过算法计算轮椅与障碍物的距離,给出合理避障方案,还会语音提示,并在驾驶者误操作距离障碍物30cm处紧急制停。
3.结束语
现代轮椅的发展向着更加智能与舒适的方向不断前进,本文通过对轮椅设计改造,实现了省力、减震、智能变速及自动避障功能,方便了使用者。
参考文献
[1]杜妍辰.基于智能轮椅的电磁减震装置设计[J].生物医学工程学进展,2018,39(3):135-137
[2]孙楚杰. 智能轮椅运动控制和自动避障系统研究[D].湖北:湖北工业大学2020
[3]杨馥华,康婷霞. 无刷电机 PWM 调速系统设计[J]电子设计工程,2021,29(7):124-128
项目来源:2021年辽宁省大学生创新创业项目,编号202110148014
通讯作者:柳青,女,讲师,硕士,从事机械产品设计
第一作者:张泽江,男,本科生
推荐访问:减震 轮椅 变速推荐文章
- 【想移民荷兰的朋友看过来,告诉你定居荷兰是一种怎样的生活体验】荷兰移民需要什么条件
- [关于训练口才的经典句子]训练口才的经典句子
- 【加拿大留学金融系专业排名】 加拿大留学专业排名
- 2018年四川省人民医院神经外科临床医师编外人员招聘公告 2018年神经外科年会
- 2018安徽高考志愿填报及征集志愿时间安排:2018高考志愿填报征集志愿时间
- 行政前台工作计划表_行政前台工作计划怎么写
- 和女朋友表白感人的话_和女朋友表白的句子
- 【英语语法:the,fact,that的语法功能】 in fact等于什么
- [2018入党培训心得体会范文2000字【三篇】]入党积极分子思想汇报
- 2018年中级审计师考试试题每日一练(6.14)|审计师报名时间2018